|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
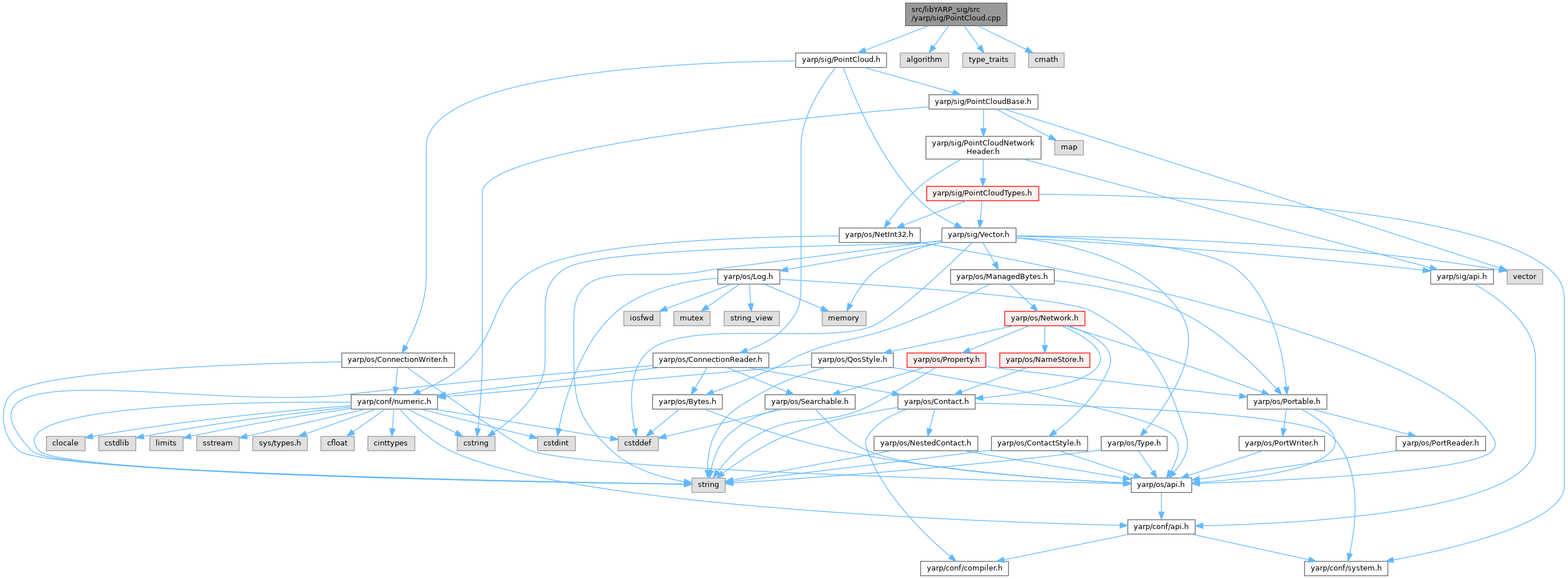
 Include dependency graph for PointCloud.cpp:
Include dependency graph for PointCloud.cpp:Go to the source code of this file.
Namespaces | |
| namespace | yarp |
| The main, catch-all namespace for YARP. | |
| namespace | yarp::sig |