|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
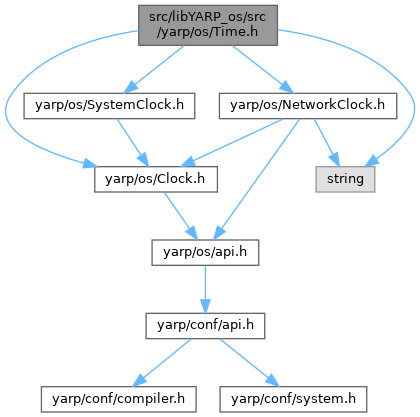
#include <yarp/os/Clock.h>#include <yarp/os/NetworkClock.h>#include <yarp/os/SystemClock.h>#include <string> Include dependency graph for Time.h:
Include dependency graph for Time.h:Go to the source code of this file.
Namespaces | |
| namespace | yarp |
| The main, catch-all namespace for YARP. | |
| namespace | yarp::os |
| An interface to the operating system, including Port based communication. | |
| namespace | yarp::os::Time |
Enumerations | |
| enum class | yarp::os::ShouldUseSystemClock { yarp::os::No = 0 , yarp::os::Yes = 1 } |
| enum | yarp::os::yarpClockType { yarp::os::YARP_CLOCK_UNINITIALIZED = -1 , yarp::os::YARP_CLOCK_DEFAULT , yarp::os::YARP_CLOCK_SYSTEM , yarp::os::YARP_CLOCK_NETWORK , yarp::os::YARP_CLOCK_CUSTOM } |
Functions | |
| void | yarp::os::Time::delay (double seconds) |
| Wait for a certain number of seconds. | |
| double | yarp::os::Time::now () |
| Return the current time in seconds, relative to an arbitrary starting point. | |
| void | yarp::os::Time::yield () |
| The calling thread releases its remaining quantum upon calling this function. | |
| void | yarp::os::Time::useSystemClock () |
| Configure YARP to use system time (this is the default). | |
| void | yarp::os::Time::useNetworkClock (const std::string &clock, const std::string &localPortName="") |
| Configure YARP to read time from a specified topic. | |
| void | yarp::os::Time::useCustomClock (Clock *clock) |
| Configure YARP clients to use a custom clock source provided by the user. | |
| bool | yarp::os::Time::isClockInitialized () |
| Check if YARP clock is initialized. | |
| bool | yarp::os::Time::isSystemClock () |
| Check if YARP is providing system time. | |
| bool | yarp::os::Time::isNetworkClock () |
| Check if YARP is providing network time. | |
| bool | yarp::os::Time::isCustomClock () |
| Check if YARP is using a user-defined custom time. | |
| yarpClockType | yarp::os::Time::getClockType () |
| std::string | yarp::os::Time::clockTypeToString (yarpClockType type) |
| Converts clock type enum into string. | |
| bool | yarp::os::Time::isValid () |
| Check if time is valid (non-zero). | |