|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
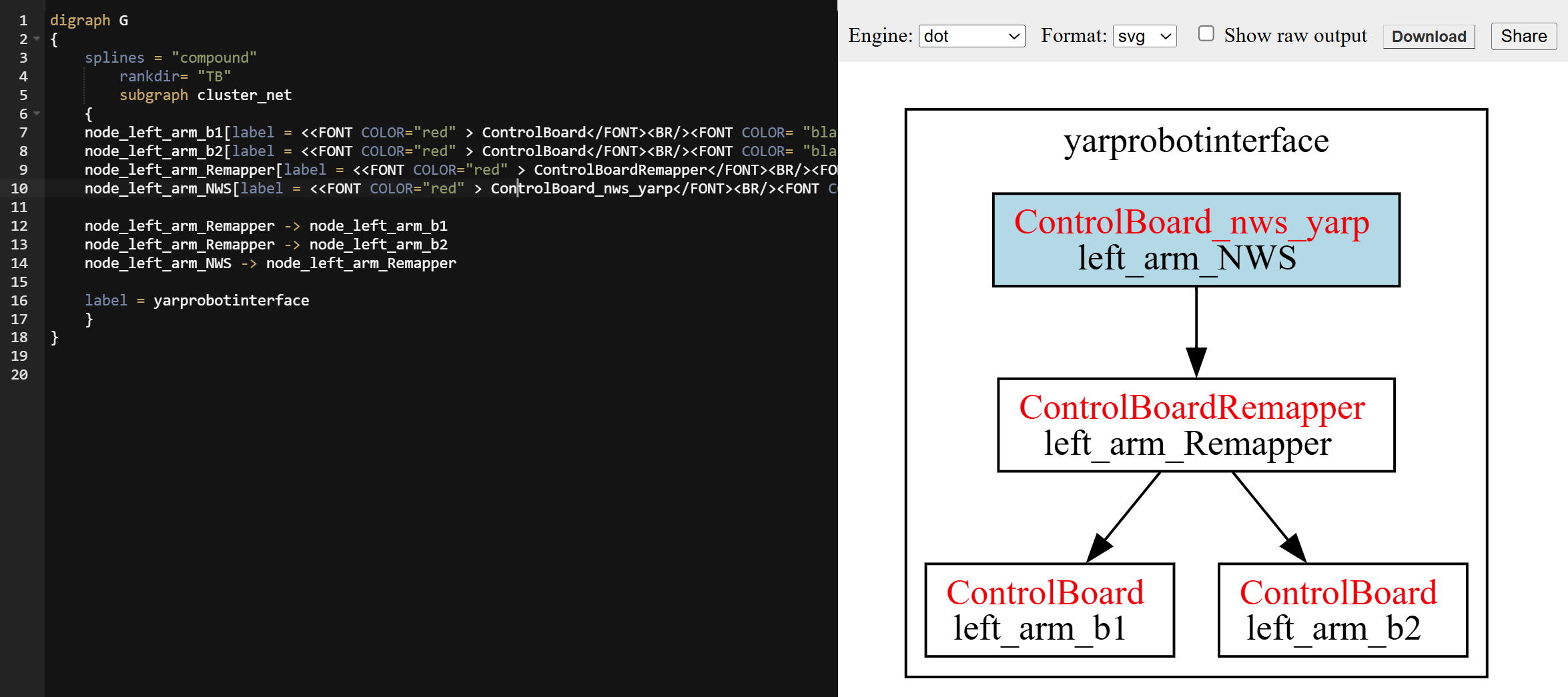
 Collaboration diagram for yarpRobotDescriptionInfo: A tool to inspect YARP devices used by yarprobotinterface:
Collaboration diagram for yarpRobotDescriptionInfo: A tool to inspect YARP devices used by yarprobotinterface:This tool generate a .dot file which describes a graph representing all the devices used by yarpobotinterface and their connections. The module requires a running yarprobotinterface to which connect to (the yarprobotinterface module must expose the a robotDescription_nws_yarp device with an RPC port) Use an online dot editor (e.g. https://dreampuf.github.io/GraphvizOnline) to visualize the generated .dot graph. See also the yarprobotinterface page.
Options:
– use the --file <filename> option to choose the name of the output file. (default: outputfile.dot)
– use the --remote <remote_port> to select a specific the robotDescription_nws_yarp rpc port (default: /robotDescription_nws_yarp/rpc)