|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
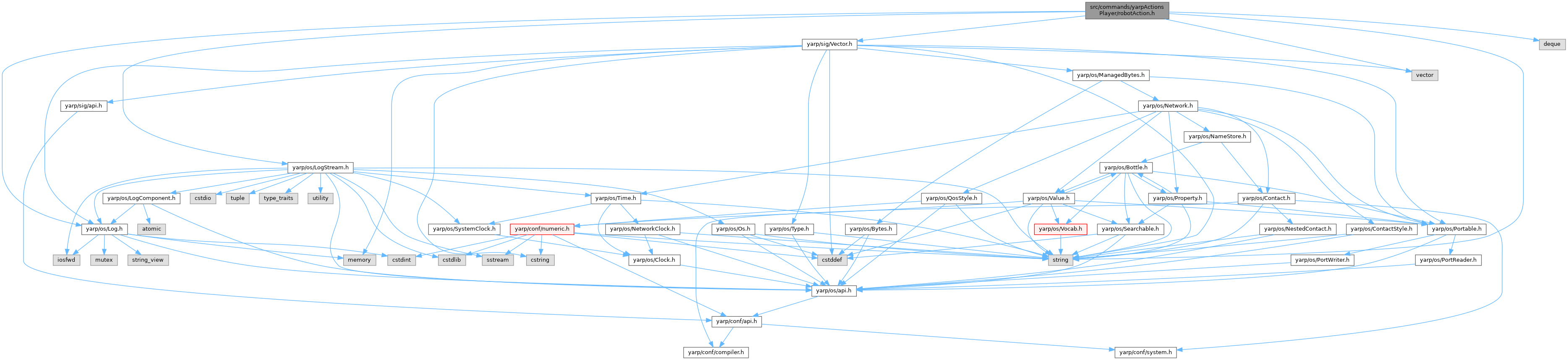
#include <yarp/os/Log.h>#include <yarp/os/LogStream.h>#include <yarp/sig/Vector.h>#include <string>#include <vector>#include <deque> Include dependency graph for robotAction.h: This graph shows which files directly or indirectly include this file:
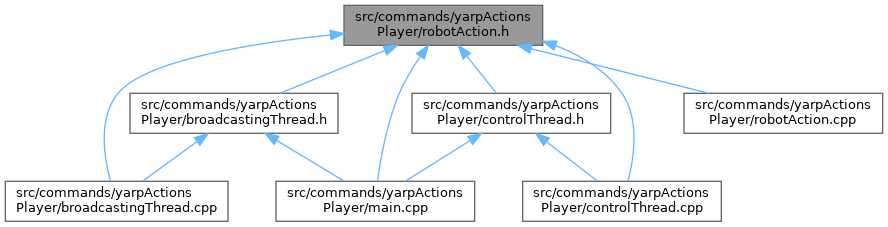
Include dependency graph for robotAction.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | action_frame |
| class | action_class |
Enumerations | |
| enum | action_status_enum { ACTION_IDLE = 0 , ACTION_START = 1 , ACTION_RUNNING = 2 , ACTION_STOP = 3 , ACTION_RESET = 4 } |
| enum action_status_enum |
| Enumerator | |
|---|---|
| ACTION_IDLE | |
| ACTION_START | |
| ACTION_RUNNING | |
| ACTION_STOP | |
| ACTION_RESET | |
Definition at line 17 of file robotAction.h.