|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
The DLidarDeviceTemplate class. More...
#include <yarp/dev/Lidar2DDeviceBase.h>
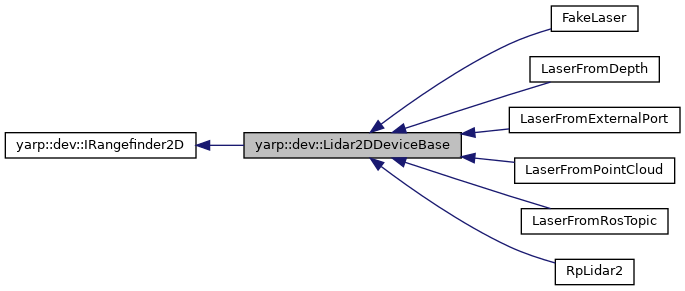
 Inheritance diagram for yarp::dev::Lidar2DDeviceBase:
Inheritance diagram for yarp::dev::Lidar2DDeviceBase:The DLidarDeviceTemplate class.
This class has been designed to uniform the parsing of lidar yarp devices.
Definition at line 32 of file Lidar2DDeviceBase.h.
Public Member Functions | |
| bool | parseConfiguration (yarp::os::Searchable &config) |
| Lidar2DDeviceBase () | |
| bool | getRawData (yarp::sig::Vector &data) override |
| Get the device measurements. More... | |
| bool | getLaserMeasurement (std::vector< LaserMeasurementData > &data) override |
| Get the device measurements. More... | |
| bool | getDeviceStatus (Device_status &status) override |
| get the device status More... | |
| bool | getDeviceInfo (std::string &device_info) override |
| get the device hardware charactestics More... | |
| bool | getDistanceRange (double &min, double &max) override |
| get the device detection range More... | |
| bool | getScanLimits (double &min, double &max) override |
| get the scan angular range. More... | |
| bool | getHorizontalResolution (double &step) override |
| get the angular step between two measurments. More... | |
| bool | getScanRate (double &rate) override |
| get the scan rate (scans per seconds) More... | |
| Public Member Functions inherited from yarp::dev::IRangefinder2D | |
| virtual | ~IRangefinder2D () |
| virtual bool | setDistanceRange (double min, double max)=0 |
| set the device detection range. More... | |
| virtual bool | setScanLimits (double min, double max)=0 |
| set the scan angular range. More... | |
| virtual bool | setHorizontalResolution (double step)=0 |
| get the angular step between two measurments (if available) More... | |
| virtual bool | setScanRate (double rate)=0 |
| set the scan rate (scans per seconds) More... | |
Protected Member Functions | |
| void | applyLimitsOnLaserData () |
Protected Attributes | |
| yarp::sig::Vector | m_laser_data |
| yarp::dev::IRangefinder2D::Device_status | m_device_status |
| std::mutex | m_mutex |
| std::string | m_info |
| double | m_scan_rate |
| size_t | m_sensorsNum |
| double | m_min_angle |
| double | m_max_angle |
| double | m_min_distance |
| double | m_max_distance |
| double | m_resolution |
| bool | m_clip_max_enable |
| bool | m_clip_min_enable |
| bool | m_do_not_clip_and_allow_infinity_enable |
| std::vector< Range_t > | m_range_skip_vector |
Additional Inherited Members | |
| Public Types inherited from yarp::dev::IRangefinder2D | |
| enum | Device_status { DEVICE_OK_STANBY = 0 , DEVICE_OK_IN_USE = 1 , DEVICE_GENERAL_ERROR = 2 , DEVICE_TIMEOUT = 3 } |
| Lidar2DDeviceBase::Lidar2DDeviceBase | ( | ) |
Definition at line 96 of file Lidar2DDeviceBase.cpp.
|
protected |
Definition at line 226 of file Lidar2DDeviceBase.cpp.
|
overridevirtual |
get the device hardware charactestics
| device_info | string containing the device infos |
Implements yarp::dev::IRangefinder2D.
Definition at line 71 of file Lidar2DDeviceBase.cpp.
|
overridevirtual |
get the device status
| status | the device status |
Implements yarp::dev::IRangefinder2D.
Definition at line 50 of file Lidar2DDeviceBase.cpp.
|
overridevirtual |
get the device detection range
| min | the minimum detection distance |
| max | the maximum detection distance |
Implements yarp::dev::IRangefinder2D.
Definition at line 35 of file Lidar2DDeviceBase.cpp.
|
overridevirtual |
get the angular step between two measurments.
| step | the angular step between two measurments |
Implements yarp::dev::IRangefinder2D.
Definition at line 43 of file Lidar2DDeviceBase.cpp.
|
overridevirtual |
Get the device measurements.
| data | a vector containing the measurement data, expressed in cartesian/polar format |
Implements yarp::dev::IRangefinder2D.
Definition at line 78 of file Lidar2DDeviceBase.cpp.
|
overridevirtual |
Get the device measurements.
| ranges | the vector containing the raw measurement data, as acquired by the device. |
Implements yarp::dev::IRangefinder2D.
Definition at line 57 of file Lidar2DDeviceBase.cpp.
|
overridevirtual |
get the scan angular range.
| min | start angle of the scan |
| max | end angle of the scan |
Implements yarp::dev::IRangefinder2D.
Definition at line 27 of file Lidar2DDeviceBase.cpp.
|
overridevirtual |
get the scan rate (scans per seconds)
| rate | the scan rate |
Implements yarp::dev::IRangefinder2D.
Definition at line 64 of file Lidar2DDeviceBase.cpp.
| bool Lidar2DDeviceBase::parseConfiguration | ( | yarp::os::Searchable & | config | ) |
Definition at line 110 of file Lidar2DDeviceBase.cpp.
|
protected |
Definition at line 51 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 52 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 38 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 53 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 43 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 37 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 47 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 49 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 46 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 48 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 39 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 54 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 50 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 44 of file Lidar2DDeviceBase.h.
|
protected |
Definition at line 45 of file Lidar2DDeviceBase.h.
 1.9.1
1.9.1