|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
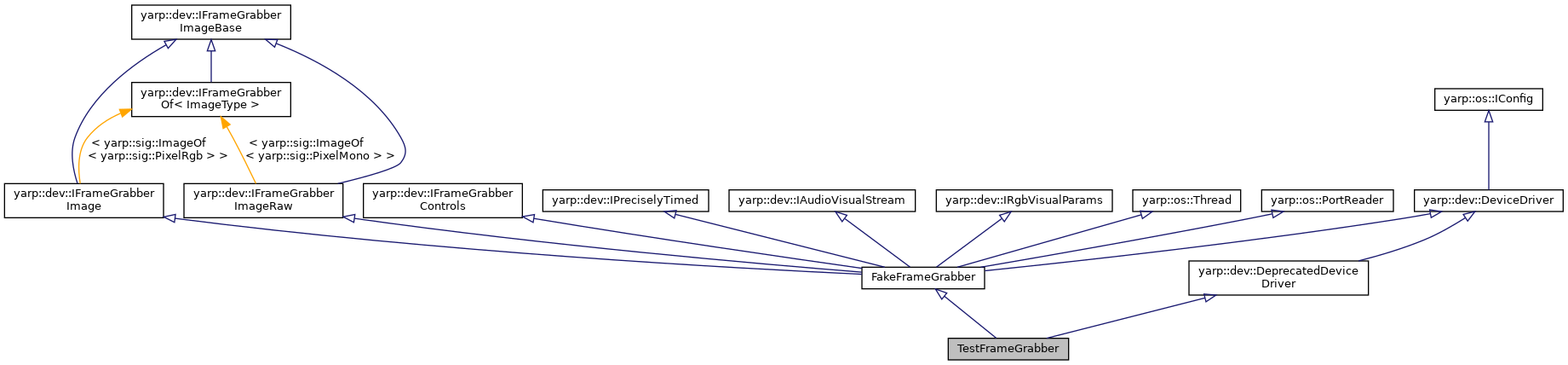
testFrameGrabber deprecated
More...
#include <fakeFrameGrabber/FakeFrameGrabber.h>
 Inheritance diagram for TestFrameGrabber:
Inheritance diagram for TestFrameGrabber:Additional Inherited Members | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| DeviceDriver () | |
| DeviceDriver (const DeviceDriver &other)=delete | |
| DeviceDriver (DeviceDriver &&other) noexcept=delete | |
| DeviceDriver & | operator= (const DeviceDriver &other)=delete |
| DeviceDriver & | operator= (DeviceDriver &&other) noexcept=delete |
| ~DeviceDriver () override | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. More... | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| virtual std::string | id () const |
| Return the id assigned to the PolyDriver. More... | |
| virtual void | setId (const std::string &id) |
| Set the id for this device. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | open (Searchable &config) |
| Initialize the object. More... | |
| virtual bool | close () |
| Shut the object down. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from FakeFrameGrabber | |
| FakeFrameGrabber ()=default | |
| FakeFrameGrabber (const FakeFrameGrabber &)=delete | |
| FakeFrameGrabber (FakeFrameGrabber &&)=delete | |
| FakeFrameGrabber & | operator= (const FakeFrameGrabber &)=delete |
| FakeFrameGrabber & | operator= (FakeFrameGrabber &&)=delete |
| ~FakeFrameGrabber () override=default | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| bool | open (yarp::os::Searchable &config) override |
| Configure with a set of options. More... | |
| bool | read (yarp::os::ConnectionReader &connection) override |
| Read this object from a network connection. More... | |
| void | run () override |
| Main body of the new thread. More... | |
| void | onStop () override |
| Call-back, called while halting the thread (before join). More... | |
| void | timing () |
| int | height () const override |
| Return the height of each frame. More... | |
| int | width () const override |
| Return the width of each frame. More... | |
| int | getRgbHeight () override |
| Return the height of each frame. More... | |
| int | getRgbWidth () override |
| Return the width of each frame. More... | |
| bool | getRgbSupportedConfigurations (yarp::sig::VectorOf< yarp::dev::CameraConfig > &configurations) override |
| Get the possible configurations of the camera. More... | |
| bool | getRgbResolution (int &width, int &height) override |
| Get the resolution of the rgb image from the camera. More... | |
| bool | setRgbResolution (int width, int height) override |
| Set the resolution of the rgb image from the camera. More... | |
| bool | getRgbFOV (double &horizontalFov, double &verticalFov) override |
| Get the field of view (FOV) of the rgb camera. More... | |
| bool | setRgbFOV (double horizontalFov, double verticalFov) override |
| Set the field of view (FOV) of the rgb camera. More... | |
| bool | getRgbIntrinsicParam (yarp::os::Property &intrinsic) override |
| Get the intrinsic parameters of the rgb camera. More... | |
| bool | getRgbMirroring (bool &mirror) override |
| Get the mirroring setting of the sensor. More... | |
| bool | setRgbMirroring (bool mirror) override |
| Set the mirroring setting of the sensor. More... | |
| bool | getImage (yarp::sig::ImageOf< yarp::sig::PixelRgb > &image) override |
| Get an image from the frame grabber. More... | |
| bool | getImage (yarp::sig::ImageOf< yarp::sig::PixelMono > &image) override |
| Get an image from the frame grabber. More... | |
| bool | getImageCrop (cropType_id_t cropType, yarp::sig::VectorOf< std::pair< int, int > > vertices, yarp::sig::ImageOf< yarp::sig::PixelRgb > &image) override |
| bool | getImageCrop (cropType_id_t cropType, yarp::sig::VectorOf< std::pair< int, int > > vertices, yarp::sig::ImageOf< yarp::sig::PixelMono > &image) override |
| yarp::os::Stamp | getLastInputStamp () override |
| Return the time stamp relative to the last acquisition. More... | |
| bool | hasAudio () override |
| bool | hasVideo () override |
| bool | hasRawVideo () override |
| bool | getCameraDescription (CameraDescriptor *camera) override |
| Get a basic description of the camera hw. More... | |
| bool | hasFeature (int feature, bool *hasFeature) override |
| Check if camera has the requested feature (saturation, brightness ... ) More... | |
| bool | setFeature (int feature, double value) override |
| Set the requested feature to a value (saturation, brightness ... ) More... | |
| bool | getFeature (int feature, double *value) override |
| Get the current value for the requested feature. More... | |
| bool | setFeature (int feature, double value1, double value2) override |
| Set the requested feature to a value using 2 params (like white balance) More... | |
| bool | getFeature (int feature, double *value1, double *value2) override |
| Get the current value for the requested feature. More... | |
| bool | hasOnOff (int feature, bool *HasOnOff) override |
| Check if the camera has the ability to turn on/off the requested feature. More... | |
| bool | setActive (int feature, bool onoff) override |
| Set the requested feature on or off. More... | |
| bool | getActive (int feature, bool *isActive) override |
| Get the current status of the feature, on or off. More... | |
| bool | hasAuto (int feature, bool *hasAuto) override |
| Check if the requested feature has the 'auto' mode. More... | |
| bool | hasManual (int feature, bool *hasManual) override |
| Check if the requested feature has the 'manual' mode. More... | |
| bool | hasOnePush (int feature, bool *hasOnePush) override |
| Check if the requested feature has the 'onePush' mode. More... | |
| bool | setMode (int feature, FeatureMode mode) override |
| Set the requested mode for the feature. More... | |
| bool | getMode (int feature, FeatureMode *mode) override |
| Get the current mode for the feature. More... | |
| bool | setOnePush (int feature) override |
| Set the requested feature to a value (saturation, brightness ... ) More... | |
| Public Member Functions inherited from yarp::dev::IFrameGrabberOf< yarp::sig::ImageOf< yarp::sig::PixelRgb > > | |
| virtual bool | getImage (yarp::sig::ImageOf< yarp::sig::PixelRgb > &image)=0 |
| Get an image from the frame grabber. More... | |
| virtual bool | getImageCrop (cropType_id_t cropType, yarp::sig::VectorOf< std::pair< int, int > > vertices, yarp::sig::ImageOf< yarp::sig::PixelRgb > &image) |
| Get a crop of the image from the frame grabber. More... | |
| Public Member Functions inherited from yarp::dev::IFrameGrabberImageBase | |
| virtual | ~IFrameGrabberImageBase () |
| Destructor. More... | |
| virtual int | height () const =0 |
| Return the height of each frame. More... | |
| virtual int | width () const =0 |
| Return the width of each frame. More... | |
| Public Member Functions inherited from yarp::dev::IFrameGrabberOf< yarp::sig::ImageOf< yarp::sig::PixelMono > > | |
| virtual bool | getImage (yarp::sig::ImageOf< yarp::sig::PixelMono > &image)=0 |
| Get an image from the frame grabber. More... | |
| virtual bool | getImageCrop (cropType_id_t cropType, yarp::sig::VectorOf< std::pair< int, int > > vertices, yarp::sig::ImageOf< yarp::sig::PixelMono > &image) |
| Get a crop of the image from the frame grabber. More... | |
| Public Member Functions inherited from yarp::dev::IFrameGrabberControls | |
| virtual | ~IFrameGrabberControls () |
| Destructor. More... | |
| virtual bool | setBrightness (double v) |
| Set the brightness. More... | |
| virtual bool | setExposure (double v) |
| Set the exposure. More... | |
| virtual bool | setSharpness (double v) |
| Set the sharpness. More... | |
| virtual bool | setWhiteBalance (double blue, double red) |
| Set the white balance for the frame grabber. More... | |
| virtual bool | setHue (double v) |
| Set the hue. More... | |
| virtual bool | setSaturation (double v) |
| Set the saturation. More... | |
| virtual bool | setGamma (double v) |
| Set the gamma. More... | |
| virtual bool | setShutter (double v) |
| Set the shutter parameter. More... | |
| virtual bool | setGain (double v) |
| Set the gain. More... | |
| virtual bool | setIris (double v) |
| Set the iris. More... | |
| virtual double | getBrightness () |
| Read the brightness parameter. More... | |
| virtual double | getExposure () |
| Read the exposure parameter. More... | |
| virtual double | getSharpness () |
| Read the sharpness parameter. More... | |
| virtual bool | getWhiteBalance (double &blue, double &red) |
| Read the white balance parameters. More... | |
| virtual double | getHue () |
| Read the hue parameter. More... | |
| virtual double | getSaturation () |
| Read the saturation parameter. More... | |
| virtual double | getGamma () |
| Read the gamma parameter. More... | |
| virtual double | getShutter () |
| Read the shutter parameter. More... | |
| virtual double | getGain () |
| Read the gain parameter. More... | |
| virtual double | getIris () |
| Read the iris parameter. More... | |
| std::string | busType2String (BusType type) |
| FeatureMode | toFeatureMode (bool _auto) |
| virtual bool | getCameraDescription (CameraDescriptor *camera)=0 |
| Get a basic description of the camera hw. More... | |
| virtual bool | hasFeature (int feature, bool *hasFeature)=0 |
| Check if camera has the requested feature (saturation, brightness ... ) More... | |
| virtual bool | setFeature (int feature, double value)=0 |
| Set the requested feature to a value (saturation, brightness ... ) More... | |
| virtual bool | getFeature (int feature, double *value)=0 |
| Get the current value for the requested feature. More... | |
| virtual bool | setFeature (int feature, double value1, double value2)=0 |
| Set the requested feature to a value using 2 params (like white balance) More... | |
| virtual bool | getFeature (int feature, double *value1, double *value2)=0 |
| Get the current value for the requested feature. More... | |
| virtual bool | hasOnOff (int feature, bool *HasOnOff)=0 |
| Check if the camera has the ability to turn on/off the requested feature. More... | |
| virtual bool | setActive (int feature, bool onoff)=0 |
| Set the requested feature on or off. More... | |
| virtual bool | getActive (int feature, bool *isActive)=0 |
| Get the current status of the feature, on or off. More... | |
| virtual bool | hasAuto (int feature, bool *hasAuto)=0 |
| Check if the requested feature has the 'auto' mode. More... | |
| virtual bool | hasManual (int feature, bool *hasManual)=0 |
| Check if the requested feature has the 'manual' mode. More... | |
| virtual bool | hasOnePush (int feature, bool *hasOnePush)=0 |
| Check if the requested feature has the 'onePush' mode. More... | |
| virtual bool | setMode (int feature, FeatureMode mode)=0 |
| Set the requested mode for the feature. More... | |
| virtual bool | getMode (int feature, FeatureMode *mode)=0 |
| Get the current mode for the feature. More... | |
| virtual bool | setOnePush (int feature)=0 |
| Set the requested feature to a value (saturation, brightness ... ) More... | |
| Public Member Functions inherited from yarp::dev::IPreciselyTimed | |
| virtual | ~IPreciselyTimed () |
| virtual yarp::os::Stamp | getLastInputStamp ()=0 |
| Return the time stamp relative to the last acquisition. More... | |
| Public Member Functions inherited from yarp::dev::IAudioVisualStream | |
| virtual | ~IAudioVisualStream () |
| Destructor. More... | |
| virtual bool | hasAudio ()=0 |
| virtual bool | hasVideo ()=0 |
| virtual bool | hasRawVideo () |
| Public Member Functions inherited from yarp::dev::IRgbVisualParams | |
| virtual | ~IRgbVisualParams () |
| virtual int | getRgbHeight ()=0 |
| Return the height of each frame. More... | |
| virtual int | getRgbWidth ()=0 |
| Return the width of each frame. More... | |
| virtual bool | getRgbSupportedConfigurations (yarp::sig::VectorOf< yarp::dev::CameraConfig > &configurations) |
| Get the possible configurations of the camera. More... | |
| virtual bool | getRgbResolution (int &width, int &height) |
| Get the resolution of the rgb image from the camera. More... | |
| virtual bool | setRgbResolution (int width, int height)=0 |
| Set the resolution of the rgb image from the camera. More... | |
| virtual bool | getRgbFOV (double &horizontalFov, double &verticalFov)=0 |
| Get the field of view (FOV) of the rgb camera. More... | |
| virtual bool | setRgbFOV (double horizontalFov, double verticalFov)=0 |
| Set the field of view (FOV) of the rgb camera. More... | |
| virtual bool | getRgbIntrinsicParam (yarp::os::Property &intrinsic)=0 |
| Get the intrinsic parameters of the rgb camera. More... | |
| virtual bool | getRgbMirroring (bool &mirror)=0 |
| Get the mirroring setting of the sensor. More... | |
| virtual bool | setRgbMirroring (bool mirror)=0 |
| Set the mirroring setting of the sensor. More... | |
| Public Member Functions inherited from yarp::os::Thread | |
| Thread () | |
| Constructor. More... | |
| virtual | ~Thread () |
| Destructor. More... | |
| virtual void | run ()=0 |
| Main body of the new thread. More... | |
| virtual void | onStop () |
| Call-back, called while halting the thread (before join). More... | |
| bool | start () |
| Start the new thread running. More... | |
| bool | stop () |
| Stop the thread. More... | |
| virtual void | beforeStart () |
| Called just before a new thread starts. More... | |
| virtual void | afterStart (bool success) |
| Called just after a new thread starts (or fails to start), this is executed by the same thread that calls start(). More... | |
| virtual bool | threadInit () |
| Initialization method. More... | |
| virtual void | threadRelease () |
| Release method. More... | |
| bool | isStopping () |
| Returns true if the thread is stopping (Thread::stop has been called). More... | |
| bool | isRunning () |
| Returns true if the thread is running (Thread::start has been called successfully and the thread has not stopped). More... | |
| long int | getKey () |
| Get a unique identifier for the thread. More... | |
| int | setPriority (int priority, int policy=-1) |
| Set the priority and scheduling policy of the thread, if the OS supports that. More... | |
| int | getPriority () |
| Query the current priority of the thread, if the OS supports that. More... | |
| int | getPolicy () |
| Query the current scheduling policy of the thread, if the OS supports that. More... | |
| bool | join (double seconds=-1) |
| The function returns when the thread execution has completed. More... | |
| void | setOptions (int stackSize=0) |
| Set the stack size for the new thread. More... | |
| Public Member Functions inherited from yarp::os::PortReader | |
| virtual | ~PortReader () |
| Destructor. More... | |
| virtual bool | read (ConnectionReader &reader)=0 |
| Read this object from a network connection. More... | |
| virtual Type | getReadType () const |
| Static Public Member Functions inherited from yarp::os::Thread | |
| static int | getCount () |
| Check how many threads are running. More... | |
| static long int | getKeyOfCaller () |
| Get a unique identifier for the calling thread. More... | |
| static void | yield () |
| Reschedule the execution of current thread, allowing other threads to run. More... | |
| static void | setDefaultStackSize (int stackSize) |
| Set the default stack size for all threads created after this point. More... | |
testFrameGrabber deprecated
Definition at line 230 of file FakeFrameGrabber.h.