|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
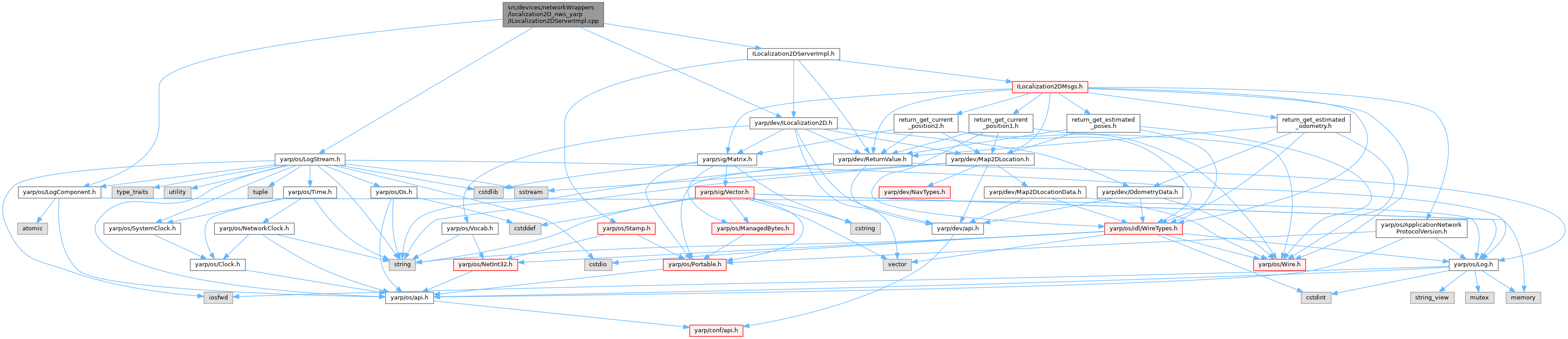
#include <yarp/os/LogComponent.h>#include <yarp/os/LogStream.h>#include <yarp/dev/ILocalization2D.h>#include "ILocalization2DServerImpl.h" Include dependency graph for ILocalization2DServerImpl.cpp:
Include dependency graph for ILocalization2DServerImpl.cpp:Go to the source code of this file.
Macros | |
| #define | DEFAULT_THREAD_PERIOD 0.01 |
| #define | M_PI 3.14159265358979323846 |
| #define | CHECK_POINTER(xxx) {if (xxx==nullptr) {yCError(LOCALIZATION2DSERVER, "Invalid interface"); return false;}} |
| #define CHECK_POINTER | ( | xxx | ) | {if (xxx==nullptr) {yCError(LOCALIZATION2DSERVER, "Invalid interface"); return false;}} |
Definition at line 28 of file ILocalization2DServerImpl.cpp.
| #define DEFAULT_THREAD_PERIOD 0.01 |
Definition at line 18 of file ILocalization2DServerImpl.cpp.
| #define M_PI 3.14159265358979323846 |
Definition at line 21 of file ILocalization2DServerImpl.cpp.