|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
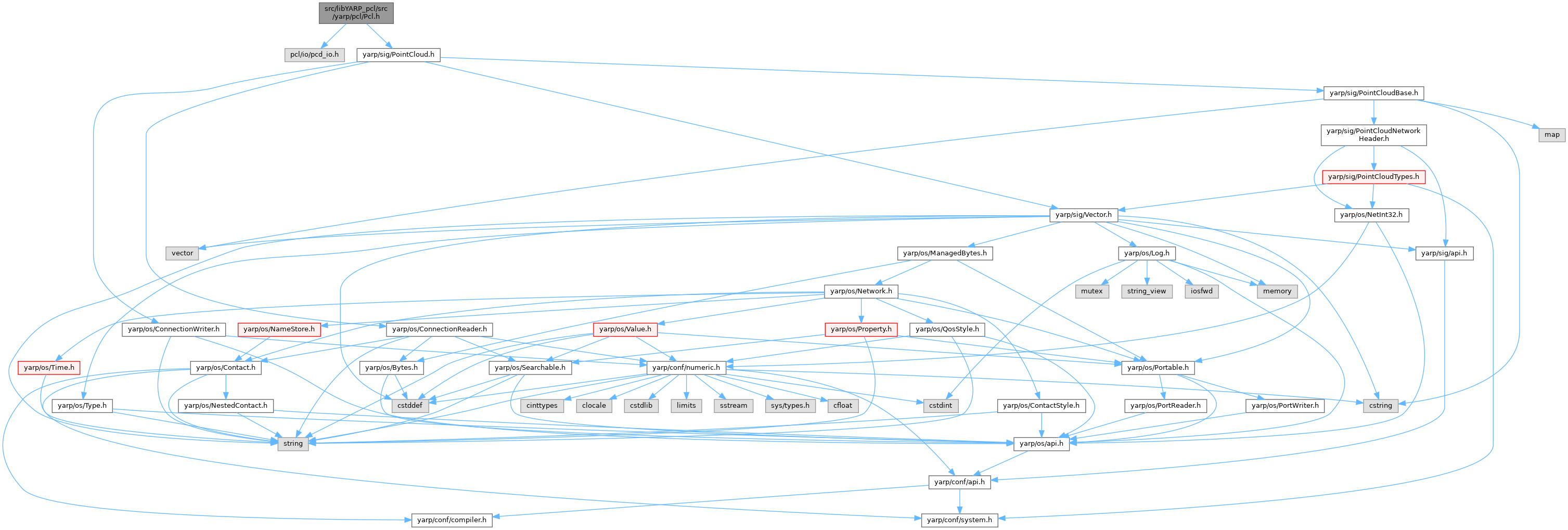
 Include dependency graph for Pcl.h:
Include dependency graph for Pcl.h:Go to the source code of this file.
Namespaces | |
| namespace | yarp |
| The main, catch-all namespace for YARP. | |
| namespace | yarp::pcl |
Functions | |
| template<class T1 , class T2 > | |
| bool | yarp::pcl::toPCL (const yarp::sig::PointCloud< T1 > &yarpCloud, ::pcl::PointCloud< T2 > &pclCloud) |
| Convert a yarp::sig::PointCloud to a pcl::PointCloud object. | |
| template<class T1 , class T2 > | |
| bool | yarp::pcl::fromPCL (const ::pcl::PointCloud< T1 > &pclCloud, yarp::sig::PointCloud< T2 > &yarpCloud) |
| Convert a pcl::PointCloud to a yarp::sig::PointCloud object. | |
| template<class T1 , class T2 > | |
| int | yarp::pcl::savePCD (const std::string &file_name, const yarp::sig::PointCloud< T1 > &yarpCloud) |
| Save a yarp::sig::PointCloud to PCD file, ASCII format. | |
| template<class T1 , class T2 > | |
| int | yarp::pcl::loadPCD (const std::string &file_name, yarp::sig::PointCloud< T2 > &yarpCloud) |
| Load a yarp::sig::PointCloud from a PCD file, ASCII format. | |