|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
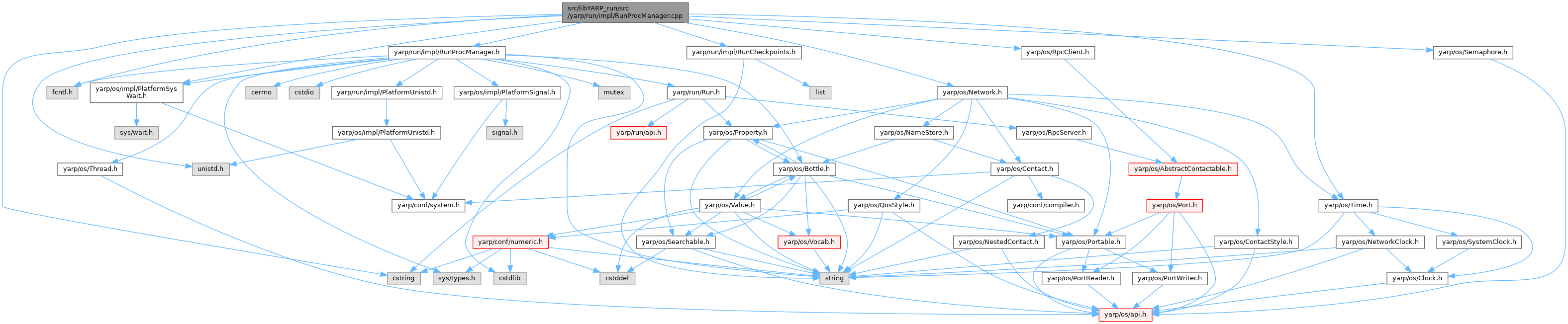
#include <yarp/run/impl/RunProcManager.h>#include <yarp/run/impl/RunCheckpoints.h>#include <yarp/os/Network.h>#include <yarp/os/RpcClient.h>#include <yarp/os/Semaphore.h>#include <yarp/os/Time.h>#include <yarp/os/impl/PlatformSysWait.h>#include <cstring>#include <unistd.h>#include <fcntl.h> Include dependency graph for RunProcManager.cpp:
Include dependency graph for RunProcManager.cpp:Go to the source code of this file.
Macros | |
| #define | WAIT() { RUNLOG("<<<mutex.lock()") mutex.lock(); RUNLOG(">>>mutex.lock()") } |
| #define | POST() { RUNLOG("<<<mutex.unlock()") mutex.unlock(); RUNLOG(">>>mutex.unlock()") } |
Functions | |
| int | CLOSE (int h) |
| int | SIGNAL (int pid, int signum) |
Definition at line 20 of file RunProcManager.cpp.
Definition at line 19 of file RunProcManager.cpp.
| int CLOSE | ( | int | h | ) |
Definition at line 70 of file RunProcManager.cpp.
| int SIGNAL | ( | int | pid, |
| int | signum | ||
| ) |
Definition at line 76 of file RunProcManager.cpp.