|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
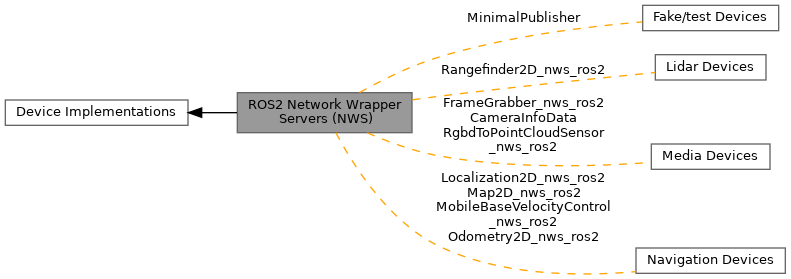
These devices take implementations of existing interfaces and wrap them up to work across the ROS2 network (see Network Wrapper Server and Network Wrapper Client Architecture). More...
 Collaboration diagram for ROS2 Network Wrapper Servers (NWS):
Collaboration diagram for ROS2 Network Wrapper Servers (NWS):Classes | |
| class | Battery_nws_ros2 |
Battery_nws_ros2: A ros2 nws to get the status of a battery and publish it on a ros2 topic. The attached device must implement a yarp::dev::IBattery interface. More... | |
| class | ControlBoard_nws_ros2 |
controlBoard_nws_ros2: A controlBoard network wrapper server for ROS2. More... | |
| class | FrameGrabber_nws_ros2 |
FrameGrabber_nws_ros2: A Network grabber for camera devices. More... | |
| class | Localization2D_nws_ros2 |
Localization2D_nws_ros2: A localization server which can be wrap multiple algorithms and devices to provide robot localization in a 2D World. More... | |
| class | Map2D_nws_ros2 |
Map2D_nws_ros2: A device capable of read/save collections of maps from disk, and make them accessible to any Map2DClient device. More... | |
| class | MobileBaseVelocityControl_nws_ros2 |
MobileBaseVelocityControl_nws_ros2: A device which allows a client application to control the velocity of a mobile base from ros2. The device opens a topic of type ::geometry_msgs::msg::Twist to receive user commands More... | |
| class | GenericSensor_nws_ros2< ROS_MSG > |
| This abstract template needs to be specialized in a ROS Publisher, for a specific ROS mesagge/sensor type. More... | |
| class | Imu_nws_ros2 |
IMU_nws_ros2: This wrapper connects to a device and publishes a ROS topic of type sensor_msgs::Imu. More... | |
| class | WrenchStamped_nws_ros2 |
WrenchStamped_nws_ros2: This wrapper connects to a device and publishes a ROS topic of type geometry_msgs::WrenchStamped. More... | |
| class | Odometry2D_nws_ros2 |
Odometry2D_nws_ros2: A ros2 nws to get odometry and publish it on a ros2 topic. The attached device must implement a yarp::dev::Nav2D::IOdometry2D interface. More... | |
| class | Rangefinder2D_controlBoard_nws_ros2 |
Rangefinder2D_nws_ros2: A Network grabber that simultaneously publishes the joint states and the measurements from a 2DRangefinder. More... | |
| class | Rangefinder2D_nws_ros2 |
Rangefinder2D_nws_ros2: A Network grabber for 2D Rangefinder devices More... | |
| struct | CameraInfoData |
RgbdSensor_nws_ros2: A Network grabber for kinect-like devices. More... | |
| class | RgbdToPointCloudSensor_nws_ros2 |
rgbdToPointCloudSensor_nws_ros2: A Network grabber for kinect-like devices. More... | |
| class | MinimalPublisher |
ros2test: A Network publisher test More... | |
These devices take implementations of existing interfaces and wrap them up to work across the ROS2 network (see Network Wrapper Server and Network Wrapper Client Architecture).