|
| | Rangefinder2D_controlBoard_nws_ros2 () |
| |
| | Rangefinder2D_controlBoard_nws_ros2 (const Rangefinder2D_controlBoard_nws_ros2 &)=delete |
| |
| | Rangefinder2D_controlBoard_nws_ros2 (Rangefinder2D_controlBoard_nws_ros2 &&) noexcept=delete |
| |
| Rangefinder2D_controlBoard_nws_ros2 & | operator= (const Rangefinder2D_controlBoard_nws_ros2 &)=delete |
| |
| Rangefinder2D_controlBoard_nws_ros2 & | operator= (Rangefinder2D_controlBoard_nws_ros2 &&) noexcept=delete |
| |
| | ~Rangefinder2D_controlBoard_nws_ros2 () override=default |
| |
| bool | attach (yarp::dev::PolyDriver *driver) override |
| | Attach to another object.
|
| |
| bool | detach () override |
| | Detach the object (you must have first called attach).
|
| |
| bool | open (yarp::os::Searchable &config) override |
| | Open the DeviceDriver.
|
| |
| bool | close () override |
| | Close the DeviceDriver.
|
| |
| bool | setDevice (yarp::dev::DeviceDriver *device) |
| |
| bool | updateAxisName () |
| |
| void | run () override |
| | Loop function.
|
| |
| | DeviceDriver () |
| |
| | DeviceDriver (const DeviceDriver &other)=delete |
| |
| | DeviceDriver (DeviceDriver &&other) noexcept=delete |
| |
| DeviceDriver & | operator= (const DeviceDriver &other)=delete |
| |
| DeviceDriver & | operator= (DeviceDriver &&other) noexcept=delete |
| |
| virtual | ~DeviceDriver () |
| |
| virtual std::string | id () const |
| | Return the id assigned to the PolyDriver.
|
| |
| virtual void | setId (const std::string &id) |
| | Set the id for this device.
|
| |
| template<class T > |
| bool | view (T *&x) |
| | Get an interface to the device driver.
|
| |
| virtual DeviceDriver * | getImplementation () |
| | Some drivers are bureaucrats, pointing at others.
|
| |
| | PeriodicThread (double period, ShouldUseSystemClock useSystemClock=ShouldUseSystemClock::No, PeriodicThreadClock clockAccuracy=PeriodicThreadClock::Relative) |
| | Constructor.
|
| |
| | PeriodicThread (double period, PeriodicThreadClock clockAccuracy) |
| | Constructor.
|
| |
| virtual | ~PeriodicThread () |
| |
| bool | start () |
| | Call this to start the thread.
|
| |
| void | step () |
| | Call this to "step" the thread rather than starting it.
|
| |
| void | stop () |
| | Call this to stop the thread, this call blocks until the thread is terminated (and releaseThread() called).
|
| |
| void | askToStop () |
| | Stop the thread.
|
| |
| bool | isRunning () const |
| | Returns true when the thread is started, false otherwise.
|
| |
| bool | isSuspended () const |
| | Returns true when the thread is suspended, false otherwise.
|
| |
| bool | setPeriod (double period) |
| | Set the (new) period of the thread.
|
| |
| double | getPeriod () const |
| | Return the current period of the thread.
|
| |
| void | suspend () |
| | Suspend the thread, the thread keeps running by doLoop is never executed.
|
| |
| void | resume () |
| | Resume the thread if previously suspended.
|
| |
| void | resetStat () |
| | Reset thread statistics.
|
| |
| double | getEstimatedPeriod () const |
| | Return estimated period since last reset.
|
| |
| void | getEstimatedPeriod (double &av, double &std) const |
| | Return estimated period since last reset.
|
| |
| unsigned int | getIterations () const |
| | Return the number of iterations performed since last reset.
|
| |
| double | getEstimatedUsed () const |
| | Return the estimated duration of the run() function since last reset.
|
| |
| void | getEstimatedUsed (double &av, double &std) const |
| | Return estimated duration of the run() function since last reset.
|
| |
| int | setPriority (int priority, int policy=-1) |
| | Set the priority and scheduling policy of the thread, if the OS supports that.
|
| |
| int | getPriority () const |
| | Query the current priority of the thread, if the OS supports that.
|
| |
| int | getPolicy () const |
| | Query the current scheduling policy of the thread, if the OS supports that.
|
| |
| | ~WrapperSingle () override |
| | Destructor.
|
| |
| bool | attachAll (const yarp::dev::PolyDriverList &drivers) final |
| | Attach to a list of objects.
|
| |
| bool | detachAll () final |
| | Detach the object (you must have first called attach).
|
| |
| virtual | ~IWrapper () |
| | Destructor.
|
| |
| virtual | ~IMultipleWrapper () |
| | Destructor.
|
| |
Rangefinder2D_nws_ros2: A Network grabber that simultaneously publishes the joint states and the measurements from a 2DRangefinder.
This device was developed for testing purposes only with fake/simulated controllers. No documentation is provided for this device. Please do not use it on a real robot.
Definition at line 38 of file Rangefinder2D_controlBoard_nws_ros2.h.
| void Rangefinder2D_controlBoard_nws_ros2::run |
( |
| ) |
|
|
overridevirtual |
Loop function.
This is the thread itself. The thread calls the run() function every <period> ms. At the end of each run, the thread will sleep the amounth of time required, taking into account the time spent inside the loop function. Example: requested period is 10ms, the run() function take 3ms to be executed, the thread will sleep for 7ms.
Note: after each run is completed, the thread will call a yield() in order to facilitate other threads to run.
Implements yarp::os::PeriodicThread.
Definition at line 90 of file Rangefinder2D_controlBoard_nws_ros2.cpp.


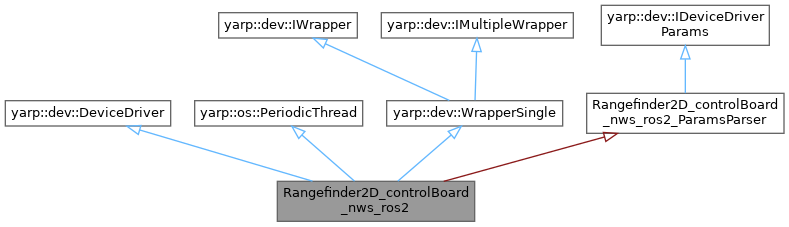
 Inheritance diagram for Rangefinder2D_controlBoard_nws_ros2:
Inheritance diagram for Rangefinder2D_controlBoard_nws_ros2: