#include <iostream>
#include <iomanip>
#include <sstream>
#include <fstream>
#include <string>
#include <cstdio>
#include <limits>
#include <cmath>
#include <opencv2/opencv.hpp>
#include <opencv2/core/version.hpp>
#include <opencv2/highgui/highgui_c.h>
#include <opencv2/highgui.hpp>
#include <vector>
#include <yarp/dev/Drivers.h>
#include <yarp/os/Network.h>
#include <yarp/os/Bottle.h>
#include <yarp/os/BufferedPort.h>
#include <yarp/os/Time.h>
#include <yarp/os/Log.h>
#include <yarp/os/ResourceFinder.h>
#include <yarp/os/LogStream.h>
#include <yarp/sig/Vector.h>
#include <yarp/sig/Image.h>
#include <yarp/dev/IRangefinder2D.h>
#include <yarp/dev/PolyDriver.h>
Go to the source code of this file.
|
| void | drawGrid (cv::Mat &img, double scale) |
| |
| void | drawRobot (cv::Mat &img, double robot_radius, double scale) |
| |
| void | drawCompass (const yarp::sig::Vector *comp, cv::Mat &img, bool absolute) |
| |
| void | drawNav (const yarp::os::Bottle *display, cv::Mat &img, double scale) |
| |
| void | drawLaser (const Vector *comp, std::vector< yarp::sig::LaserMeasurementData > *las, std::vector< yarp::sig::LaserMeasurementData > *lmap, cv::Mat &img, double angle_tot, int scans, double sens_position_x, double sens_position_y, double sens_position_t, double scale, bool absolute, bool verbose, int aspect) |
| |
| void | display_help () |
| |
| int | main (int argc, char *argv[]) |
| |
|
| const CvScalar | color_bwhite = cvScalar(200,200,255) |
| |
| const CvScalar | color_white = cvScalar(255,255,255) |
| |
| const CvScalar | color_red = cvScalar(0,0,255) |
| |
| const CvScalar | color_yellow = cvScalar(0,255,255) |
| |
| const CvScalar | color_black = cvScalar(0,0,0) |
| |
| const CvScalar | color_gray = cvScalar(100,100,100) |
| |
| bool | g_lidar_debug_nan = false |
| |
| bool | g_lidar_debug_inf = false |
| |
◆ _USE_MATH_DEFINES
◆ ASPECT_LINE
◆ ASPECT_POINT
◆ DEG2RAD
◆ display_help()
◆ drawCompass()
◆ drawGrid()
◆ drawLaser()
| void drawLaser |
( |
const Vector * |
comp, |
|
|
std::vector< yarp::sig::LaserMeasurementData > * |
las, |
|
|
std::vector< yarp::sig::LaserMeasurementData > * |
lmap, |
|
|
cv::Mat & |
img, |
|
|
double |
angle_tot, |
|
|
int |
scans, |
|
|
double |
sens_position_x, |
|
|
double |
sens_position_y, |
|
|
double |
sens_position_t, |
|
|
double |
scale, |
|
|
bool |
absolute, |
|
|
bool |
verbose, |
|
|
int |
aspect |
|
) |
| |
◆ drawNav()
◆ drawRobot()
◆ main()
◆ color_black
◆ color_bwhite
◆ color_gray
◆ color_red
◆ color_white
◆ color_yellow
◆ g_lidar_debug_inf
◆ g_lidar_debug_nan


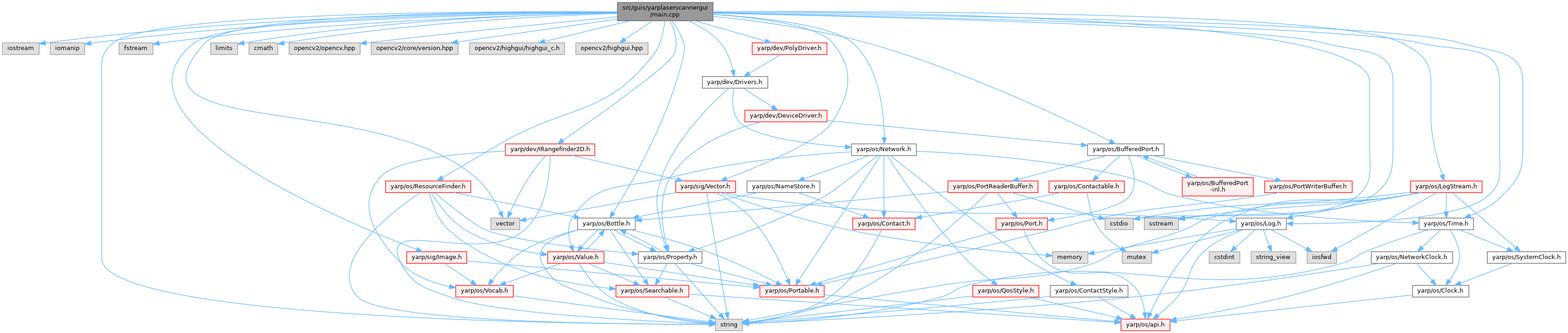
 Include dependency graph for main.cpp:
Include dependency graph for main.cpp: