Control board, encoder interface.
More...
#include <yarp/dev/IMotorEncoders.h>
Control board, encoder interface.
Definition at line 154 of file IMotorEncoders.h.
|
| virtual | ~IMotorEncoders () |
| | Destructor. More...
|
| |
| virtual bool | getNumberOfMotorEncoders (int *num)=0 |
| | Get the number of available motor encoders. More...
|
| |
| virtual bool | resetMotorEncoder (int m)=0 |
| | Reset motor encoder, single motor. More...
|
| |
| virtual bool | resetMotorEncoders ()=0 |
| | Reset motor encoders. More...
|
| |
| virtual bool | setMotorEncoderCountsPerRevolution (int m, const double cpr)=0 |
| | Sets number of counts per revolution for motor encoder m. More...
|
| |
| virtual bool | getMotorEncoderCountsPerRevolution (int m, double *cpr)=0 |
| | Gets number of counts per revolution for motor encoder m. More...
|
| |
| virtual bool | setMotorEncoder (int m, const double val)=0 |
| | Set the value of the motor encoder for a given motor. More...
|
| |
| virtual bool | setMotorEncoders (const double *vals)=0 |
| | Set the value of all motor encoders. More...
|
| |
| virtual bool | getMotorEncoder (int m, double *v)=0 |
| | Read the value of a motor encoder. More...
|
| |
| virtual bool | getMotorEncoders (double *encs)=0 |
| | Read the position of all motor encoders. More...
|
| |
| virtual bool | getMotorEncodersTimed (double *encs, double *time)=0 |
| | Read the instantaneous position of all motor encoders. More...
|
| |
| virtual bool | getMotorEncoderTimed (int m, double *encs, double *time)=0 |
| | Read the instantaneous position of a motor encoder. More...
|
| |
| virtual bool | getMotorEncoderSpeed (int m, double *sp)=0 |
| | Read the istantaneous speed of a motor encoder. More...
|
| |
| virtual bool | getMotorEncoderSpeeds (double *spds)=0 |
| | Read the instantaneous speed of all motor encoders. More...
|
| |
| virtual bool | getMotorEncoderAcceleration (int m, double *acc)=0 |
| | Read the instantaneous acceleration of a motor encoder. More...
|
| |
| virtual bool | getMotorEncoderAccelerations (double *accs)=0 |
| | Read the instantaneous acceleration of all motor encoders. More...
|
| |
◆ ~IMotorEncoders()
| virtual yarp::dev::IMotorEncoders::~IMotorEncoders |
( |
| ) |
|
|
inlinevirtual |
◆ getMotorEncoder()
| virtual bool yarp::dev::IMotorEncoders::getMotorEncoder |
( |
int |
m, |
|
|
double * |
v |
|
) |
| |
|
pure virtual |
◆ getMotorEncoderAcceleration()
| virtual bool yarp::dev::IMotorEncoders::getMotorEncoderAcceleration |
( |
int |
m, |
|
|
double * |
acc |
|
) |
| |
|
pure virtual |
◆ getMotorEncoderAccelerations()
| virtual bool yarp::dev::IMotorEncoders::getMotorEncoderAccelerations |
( |
double * |
accs | ) |
|
|
pure virtual |
◆ getMotorEncoderCountsPerRevolution()
| virtual bool yarp::dev::IMotorEncoders::getMotorEncoderCountsPerRevolution |
( |
int |
m, |
|
|
double * |
cpr |
|
) |
| |
|
pure virtual |
◆ getMotorEncoders()
| virtual bool yarp::dev::IMotorEncoders::getMotorEncoders |
( |
double * |
encs | ) |
|
|
pure virtual |
◆ getMotorEncoderSpeed()
| virtual bool yarp::dev::IMotorEncoders::getMotorEncoderSpeed |
( |
int |
m, |
|
|
double * |
sp |
|
) |
| |
|
pure virtual |
◆ getMotorEncoderSpeeds()
| virtual bool yarp::dev::IMotorEncoders::getMotorEncoderSpeeds |
( |
double * |
spds | ) |
|
|
pure virtual |
◆ getMotorEncodersTimed()
| virtual bool yarp::dev::IMotorEncoders::getMotorEncodersTimed |
( |
double * |
encs, |
|
|
double * |
time |
|
) |
| |
|
pure virtual |
◆ getMotorEncoderTimed()
| virtual bool yarp::dev::IMotorEncoders::getMotorEncoderTimed |
( |
int |
m, |
|
|
double * |
encs, |
|
|
double * |
time |
|
) |
| |
|
pure virtual |
◆ getNumberOfMotorEncoders()
| virtual bool yarp::dev::IMotorEncoders::getNumberOfMotorEncoders |
( |
int * |
num | ) |
|
|
pure virtual |
◆ resetMotorEncoder()
| virtual bool yarp::dev::IMotorEncoders::resetMotorEncoder |
( |
int |
m | ) |
|
|
pure virtual |
◆ resetMotorEncoders()
| virtual bool yarp::dev::IMotorEncoders::resetMotorEncoders |
( |
| ) |
|
|
pure virtual |
◆ setMotorEncoder()
| virtual bool yarp::dev::IMotorEncoders::setMotorEncoder |
( |
int |
m, |
|
|
const double |
val |
|
) |
| |
|
pure virtual |
◆ setMotorEncoderCountsPerRevolution()
| virtual bool yarp::dev::IMotorEncoders::setMotorEncoderCountsPerRevolution |
( |
int |
m, |
|
|
const double |
cpr |
|
) |
| |
|
pure virtual |
◆ setMotorEncoders()
| virtual bool yarp::dev::IMotorEncoders::setMotorEncoders |
( |
const double * |
vals | ) |
|
|
pure virtual |
The documentation for this class was generated from the following file:



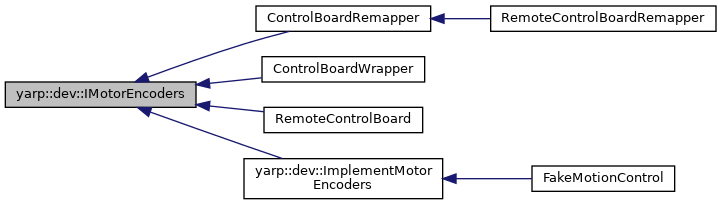
 Inheritance diagram for yarp::dev::IMotorEncoders:
Inheritance diagram for yarp::dev::IMotorEncoders: 1.9.1
1.9.1