#include <cmath>
#include <algorithm>
#include <iomanip>
#include <cstdint>
#include <yarp/os/LogComponent.h>
#include <yarp/os/Value.h>
#include <yarp/sig/ImageUtils.h>
#include <librealsense2/rsutil.h>
#include "realsense2Driver.h"
Go to the source code of this file.
|
| static std::string | get_device_information (const rs2::device &dev) |
| |
| static void | print_supported_options (const rs2::sensor &sensor) |
| |
| static bool | isSupportedFormat (const rs2::sensor &sensor, const int width, const int height, const int fps, bool verbose=false) |
| |
| static bool | optionPerc2Value (rs2_option option, const rs2::sensor *sensor, const float &perc, float &value) |
| |
| static bool | optionValue2Perc (rs2_option option, const rs2::sensor *sensor, float &perc, const float &value) |
| |
| static bool | setOption (rs2_option option, const rs2::sensor *sensor, float value) |
| |
| static bool | getOption (rs2_option option, const rs2::sensor *sensor, float &value) |
| |
| static int | pixFormatToCode (const rs2_format p) |
| |
| static size_t | bytesPerPixel (const rs2_format format) |
| |
| static YarpDistortion | rsDistToYarpDist (const rs2_distortion dist) |
| |
| static void | settingErrorMsg (const string &error, bool &ret) |
| |
| static bool | setIntrinsic (Property &intrinsic, const rs2_intrinsics &values) |
| |
| static bool | setExtrinsicParam (Matrix &extrinsic, const rs2_extrinsics &values) |
| |
◆ bytesPerPixel()
| static size_t bytesPerPixel |
( |
const rs2_format |
format | ) |
|
|
static |
◆ get_device_information()
| static std::string get_device_information |
( |
const rs2::device & |
dev | ) |
|
|
static |
◆ getOption()
| static bool getOption |
( |
rs2_option |
option, |
|
|
const rs2::sensor * |
sensor, |
|
|
float & |
value |
|
) |
| |
|
static |
◆ isSupportedFormat()
| static bool isSupportedFormat |
( |
const rs2::sensor & |
sensor, |
|
|
const int |
width, |
|
|
const int |
height, |
|
|
const int |
fps, |
|
|
bool |
verbose = false |
|
) |
| |
|
static |
◆ optionPerc2Value()
| static bool optionPerc2Value |
( |
rs2_option |
option, |
|
|
const rs2::sensor * |
sensor, |
|
|
const float & |
perc, |
|
|
float & |
value |
|
) |
| |
|
static |
◆ optionValue2Perc()
| static bool optionValue2Perc |
( |
rs2_option |
option, |
|
|
const rs2::sensor * |
sensor, |
|
|
float & |
perc, |
|
|
const float & |
value |
|
) |
| |
|
static |
◆ pixFormatToCode()
| static int pixFormatToCode |
( |
const rs2_format |
p | ) |
|
|
static |
◆ print_supported_options()
| static void print_supported_options |
( |
const rs2::sensor & |
sensor | ) |
|
|
static |
◆ rsDistToYarpDist()
◆ setExtrinsicParam()
| static bool setExtrinsicParam |
( |
Matrix & |
extrinsic, |
|
|
const rs2_extrinsics & |
values |
|
) |
| |
|
static |
◆ setIntrinsic()
| static bool setIntrinsic |
( |
Property & |
intrinsic, |
|
|
const rs2_intrinsics & |
values |
|
) |
| |
|
static |
◆ setOption()
| static bool setOption |
( |
rs2_option |
option, |
|
|
const rs2::sensor * |
sensor, |
|
|
float |
value |
|
) |
| |
|
static |
◆ settingErrorMsg()
| static void settingErrorMsg |
( |
const string & |
error, |
|
|
bool & |
ret |
|
) |
| |
|
static |
◆ accuracy
| constexpr char accuracy[] = "accuracy" |
|
constexpr |
◆ alignmentFrame
| constexpr char alignmentFrame[] = "alignmentFrame" |
|
constexpr |
◆ clipPlanes
| constexpr char clipPlanes[] = "clipPlanes" |
|
constexpr |
◆ depthRes
| constexpr char depthRes[] = "depthResolution" |
|
constexpr |
◆ enableEmitter
| constexpr char enableEmitter[] = "enableEmitter" |
|
constexpr |
◆ framerate
| constexpr char framerate[] = "framerate" |
|
constexpr |
◆ needAlignment
| constexpr char needAlignment[] = "needAlignment" |
|
constexpr |
◆ params_map
Initial value:=
{
}
constexpr char clipPlanes[]
constexpr char needAlignment[]
constexpr char enableEmitter[]
constexpr char framerate[]
constexpr char alignmentFrame[]
constexpr char depthRes[]
constexpr char accuracy[]
Definition at line 42 of file realsense2Driver.cpp.
◆ rgbRes
| constexpr char rgbRes[] = "rgbResolution" |
|
constexpr |
◆ stringRSStreamMap
| const std::map<std::string, rs2_stream> stringRSStreamMap |
|
static |
Initial value:{
{"None", RS2_STREAM_ANY},
{"RGB", RS2_STREAM_COLOR},
{"Depth", RS2_STREAM_DEPTH}
}
Definition at line 54 of file realsense2Driver.cpp.



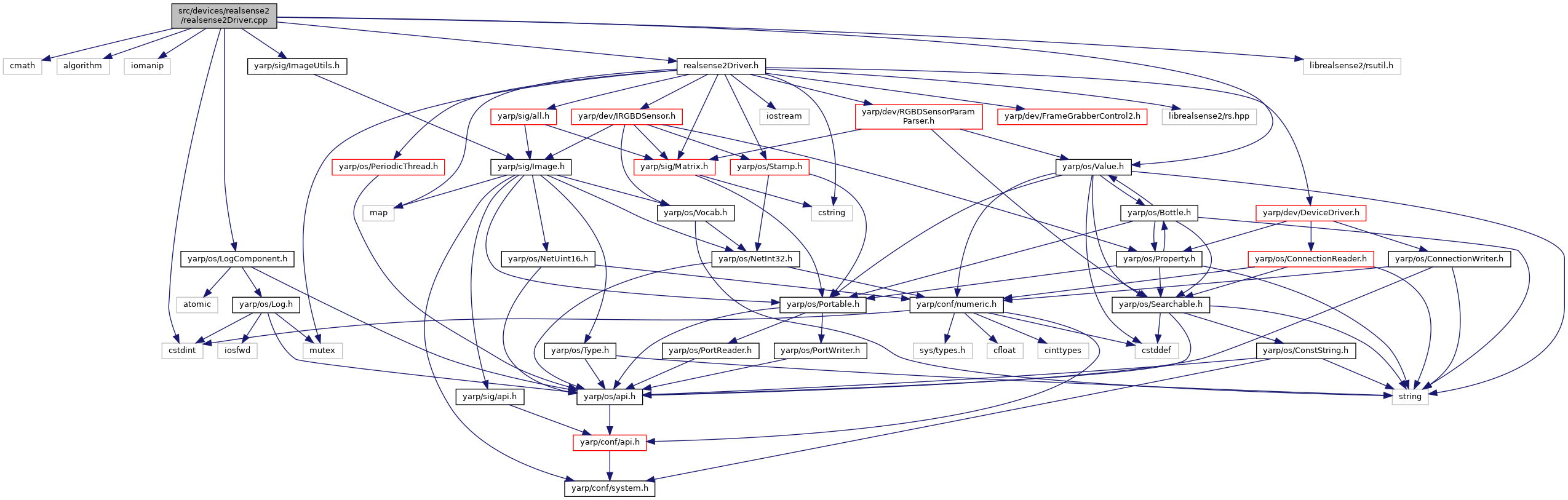
 Include dependency graph for realsense2Driver.cpp:
Include dependency graph for realsense2Driver.cpp: 1.9.1
1.9.1