|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
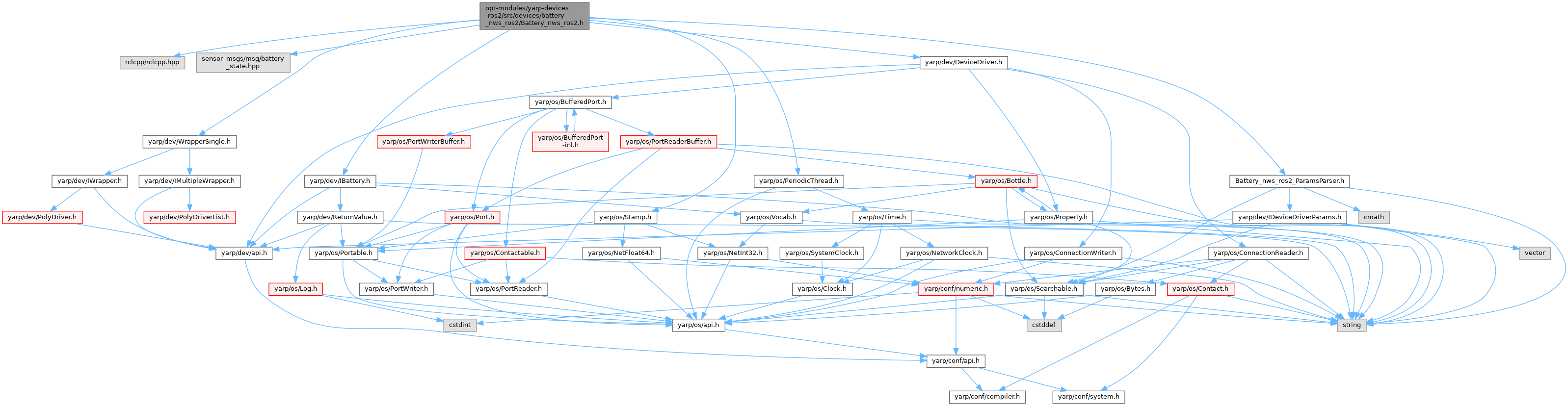
#include <rclcpp/rclcpp.hpp>#include <sensor_msgs/msg/battery_state.hpp>#include <yarp/dev/IBattery.h>#include <yarp/os/PeriodicThread.h>#include <yarp/os/Stamp.h>#include <yarp/dev/DeviceDriver.h>#include <yarp/dev/WrapperSingle.h>#include "Battery_nws_ros2_ParamsParser.h" Include dependency graph for Battery_nws_ros2.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for Battery_nws_ros2.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | Battery_nws_ros2 |
Battery_nws_ros2: A ros2 nws to get the status of a battery and publish it on a ros2 topic. The attached device must implement a yarp::dev::IBattery interface. More... | |
Macros | |
| #define | DEFAULT_THREAD_PERIOD 0.02 |
| #define DEFAULT_THREAD_PERIOD 0.02 |
Definition at line 19 of file Battery_nws_ros2.h.