|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
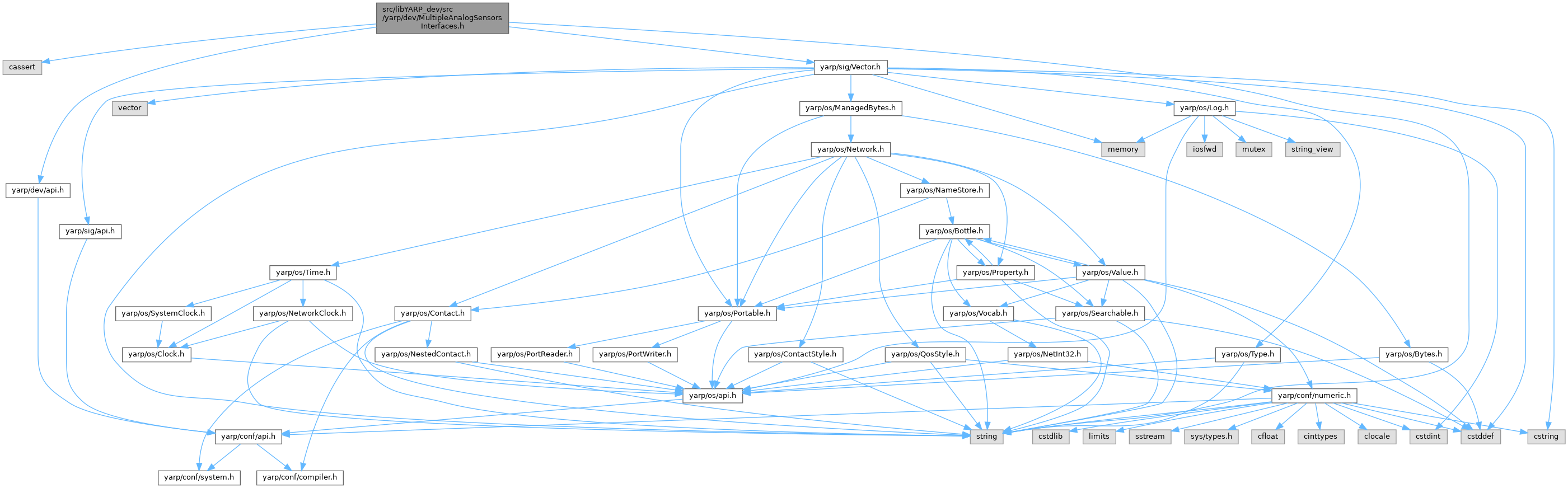
 Include dependency graph for MultipleAnalogSensorsInterfaces.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for MultipleAnalogSensorsInterfaces.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | yarp::dev::IThreeAxisGyroscopes |
| Device interface to one or multiple three axis gyroscopes. More... | |
| class | yarp::dev::IThreeAxisLinearAccelerometers |
| Device interface to one or multiple three axis linear accelerometers. More... | |
| class | yarp::dev::IThreeAxisAngularAccelerometers |
| class | yarp::dev::IThreeAxisMagnetometers |
| Device interface to one or multiple three axis magnetometers. More... | |
| class | yarp::dev::IPositionSensors |
| Device interface to one or multiple position sensors, such as UWB localization sensors. More... | |
| class | yarp::dev::ILinearVelocitySensors |
| class | yarp::dev::IOrientationSensors |
| Device interface to one or multiple orientation sensors, such as IMUs with on board estimation algorithms. More... | |
| class | yarp::dev::ITemperatureSensors |
| Device interface to one or multiple temperature sensors. More... | |
| class | yarp::dev::ISixAxisForceTorqueSensors |
| Device interface to one or multiple six axis force torque sensor. More... | |
| class | yarp::dev::IContactLoadCellArrays |
| Device interface to one or multiple contact load cell arrays. More... | |
| class | yarp::dev::IEncoderArrays |
| Device interface to one or multiple arrays of encoders. More... | |
| class | yarp::dev::ISkinPatches |
| Device interface to one or more groups (patches) of tactile sensors (skin). More... | |
Namespaces | |
| namespace | yarp |
| The main, catch-all namespace for YARP. | |
| namespace | yarp::dev |
| For streams capable of holding different kinds of content, check what they actually have. | |
Enumerations | |
| enum | yarp::dev::MAS_status { yarp::dev::MAS_OK = 0 , yarp::dev::MAS_ERROR = 1 , yarp::dev::MAS_OVF = 2 , yarp::dev::MAS_TIMEOUT = 3 , yarp::dev::MAS_WAITING_FOR_FIRST_READ = 4 , yarp::dev::MAS_UNKNOWN = 5 } |
| Status of a given analog sensor exposed by a multiple analog sensors interface. More... | |