|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
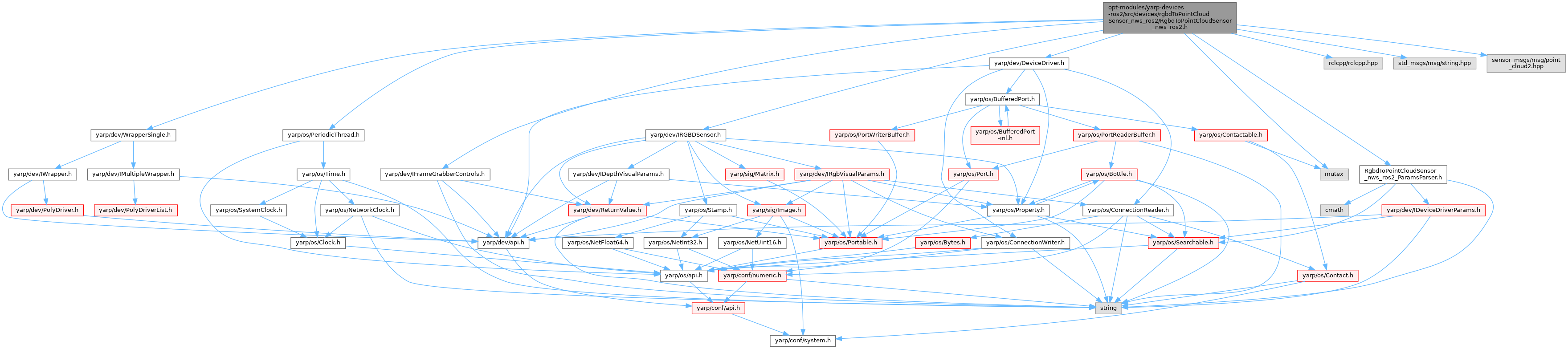
#include <yarp/dev/WrapperSingle.h>#include <yarp/dev/DeviceDriver.h>#include <yarp/os/PeriodicThread.h>#include <yarp/dev/IRGBDSensor.h>#include <yarp/dev/IFrameGrabberControls.h>#include <rclcpp/rclcpp.hpp>#include <std_msgs/msg/string.hpp>#include <sensor_msgs/msg/point_cloud2.hpp>#include <mutex>#include "RgbdToPointCloudSensor_nws_ros2_ParamsParser.h" Include dependency graph for RgbdToPointCloudSensor_nws_ros2.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for RgbdToPointCloudSensor_nws_ros2.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | RgbdToPointCloudSensor_nws_ros2 |
rgbdToPointCloudSensor_nws_ros2: A Network grabber for kinect-like devices. More... | |
Namespaces | |
| namespace | RGBDToPointCloudRos2Impl |
Variables | |
| const std::string | RGBDToPointCloudRos2Impl::frameId_param = "frame_id" |
| const std::string | RGBDToPointCloudRos2Impl::nodeName_param = "node_name" |
| const std::string | RGBDToPointCloudRos2Impl::pointCloudTopicName_param = "topic_name" |
| constexpr double | RGBDToPointCloudRos2Impl::DEFAULT_THREAD_PERIOD = 0.03 |