|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
#include <controlBoardCouplingHandler/ControlBoardCouplingHandler.h>
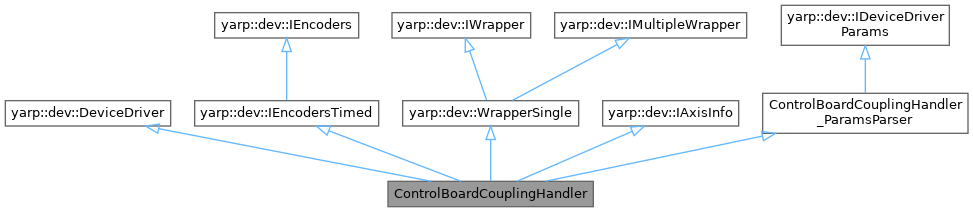
 Inheritance diagram for ControlBoardCouplingHandler:
Inheritance diagram for ControlBoardCouplingHandler:Public Member Functions | |
| ControlBoardCouplingHandler ()=default | |
| ControlBoardCouplingHandler (const ControlBoardCouplingHandler &)=delete | |
| ControlBoardCouplingHandler (ControlBoardCouplingHandler &&)=delete | |
| ControlBoardCouplingHandler & | operator= (const ControlBoardCouplingHandler &)=delete |
| ControlBoardCouplingHandler & | operator= (ControlBoardCouplingHandler &&)=delete |
| ~ControlBoardCouplingHandler () override=default | |
| bool | verbose () const |
| Return the value of the verbose flag. | |
| bool | close () override |
| Close the device driver by deallocating all resources and closing ports. | |
| bool | open (yarp::os::Searchable &prop) override |
| Open the device driver. | |
| bool | detach () override |
| Detach the object (you must have first called attach). | |
| bool | attach (yarp::dev::PolyDriver *poly) override |
| Attach to another object. | |
| bool | resetEncoder (int j) override |
| ControlBoard methods. | |
| bool | resetEncoders () override |
| Reset encoders. | |
| bool | setEncoder (int j, double val) override |
| Set the value of the encoder for a given joint. | |
| bool | setEncoders (const double *vals) override |
| Set the value of all encoders. | |
| bool | getEncoder (int j, double *v) override |
| Read the value of an encoder. | |
| bool | getEncoders (double *encs) override |
| Read the position of all axes. | |
| bool | getEncodersTimed (double *encs, double *t) override |
| Read the instantaneous acceleration of all axes. | |
| bool | getEncoderTimed (int j, double *v, double *t) override |
| Read the instantaneous acceleration of all axes. | |
| bool | getEncoderSpeed (int j, double *sp) override |
| Read the istantaneous speed of an axis. | |
| bool | getEncoderSpeeds (double *spds) override |
| Read the instantaneous speed of all axes. | |
| bool | getEncoderAcceleration (int j, double *acc) override |
| Read the instantaneous acceleration of an axis. | |
| bool | getEncoderAccelerations (double *accs) override |
| Read the instantaneous acceleration of all axes. | |
| bool | getAxes (int *ax) override |
| Get the number of controlled axes. | |
| bool | getAxisName (int j, std::string &name) override |
| bool | getJointType (int j, yarp::dev::JointTypeEnum &type) override |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| DeviceDriver () | |
| DeviceDriver (const DeviceDriver &other)=delete | |
| DeviceDriver (DeviceDriver &&other) noexcept=delete | |
| DeviceDriver & | operator= (const DeviceDriver &other)=delete |
| DeviceDriver & | operator= (DeviceDriver &&other) noexcept=delete |
| virtual | ~DeviceDriver () |
| virtual std::string | id () const |
| Return the id assigned to the PolyDriver. | |
| virtual void | setId (const std::string &id) |
| Set the id for this device. | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. | |
| Public Member Functions inherited from yarp::dev::IEncodersTimed | |
| virtual | ~IEncodersTimed () |
| Destructor. | |
| Public Member Functions inherited from yarp::dev::IEncoders | |
| virtual | ~IEncoders () |
| Destructor. | |
| Public Member Functions inherited from yarp::dev::WrapperSingle | |
| ~WrapperSingle () override | |
| Destructor. | |
| bool | attachAll (const yarp::dev::PolyDriverList &drivers) final |
| Attach to a list of objects. | |
| bool | detachAll () final |
| Detach the object (you must have first called attach). | |
| Public Member Functions inherited from yarp::dev::IWrapper | |
| virtual | ~IWrapper () |
| Destructor. | |
| Public Member Functions inherited from yarp::dev::IMultipleWrapper | |
| virtual | ~IMultipleWrapper () |
| Destructor. | |
| Public Member Functions inherited from yarp::dev::IAxisInfo | |
| virtual | ~IAxisInfo () |
| Destructor. | |
| Public Member Functions inherited from ControlBoardCouplingHandler_ParamsParser | |
| ControlBoardCouplingHandler_ParamsParser () | |
| ~ControlBoardCouplingHandler_ParamsParser () override=default | |
| bool | parseParams (const yarp::os::Searchable &config) override |
| Parse the DeviceDriver parameters. | |
| std::string | getDeviceClassName () const override |
| Get the name of the DeviceDriver class. | |
| std::string | getDeviceName () const override |
| Get the name of the device (i.e. | |
| std::string | getDocumentationOfDeviceParams () const override |
| Get the documentation of the DeviceDriver's parameters. | |
| std::vector< std::string > | getListOfParams () const override |
| Return a list of all params used by the device. | |
| bool | getParamValue (const std::string ¶mName, std::string ¶mValue) const override |
| Return the value (represented as a string) of the requested parameter. | |
| std::string | getConfiguration () const override |
| Return the configuration of the device. | |
| Public Member Functions inherited from yarp::dev::IDeviceDriverParams | |
| virtual | ~IDeviceDriverParams () |
Additional Inherited Members | |
| Public Attributes inherited from ControlBoardCouplingHandler_ParamsParser | |
| const std::string | m_device_classname = {"ControlBoardCouplingHandler"} |
| const std::string | m_device_name = {"controlBoardCouplingHandler"} |
| bool | m_parser_is_strict = false |
| const parser_version_type | m_parser_version = {} |
| std::string | m_provided_configuration |
| const std::string | m_coupling_device_defaultValue = {""} |
| std::string | m_coupling_device = {} |
Definition at line 27 of file ControlBoardCouplingHandler.h.
|
default |
|
delete |
|
delete |
|
overridedefault |
|
overridevirtual |
Attach to another object.
| driver | the polydriver that you want to attach to. |
Implements yarp::dev::IWrapper.
Definition at line 55 of file ControlBoardCouplingHandler.cpp.
|
overridevirtual |
Close the device driver by deallocating all resources and closing ports.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 22 of file ControlBoardCouplingHandler.cpp.
|
overridevirtual |
Detach the object (you must have first called attach).
Implements yarp::dev::IWrapper.
Definition at line 103 of file ControlBoardCouplingHandler.cpp.
Get the number of controlled axes.
This command asks the number of controlled axes for the current physical interface.
Implements yarp::dev::IEncoders.
Definition at line 267 of file ControlBoardCouplingHandler.cpp.
Implements yarp::dev::IAxisInfo.
Definition at line 281 of file ControlBoardCouplingHandler.cpp.
Read the value of an encoder.
| j | encoder number |
| v | pointer to storage for the return value |
Implements yarp::dev::IEncoders.
Definition at line 139 of file ControlBoardCouplingHandler.cpp.
Read the instantaneous acceleration of an axis.
| j | axis number |
| spds | pointer to the array that will contain the output |
Implements yarp::dev::IEncoders.
Definition at line 233 of file ControlBoardCouplingHandler.cpp.
Read the instantaneous acceleration of all axes.
| accs | pointer to the array that will contain the output |
Implements yarp::dev::IEncoders.
Definition at line 249 of file ControlBoardCouplingHandler.cpp.
Read the position of all axes.
| encs | pointer to the array that will contain the output |
Implements yarp::dev::IEncoders.
Definition at line 153 of file ControlBoardCouplingHandler.cpp.
Read the istantaneous speed of an axis.
| j | axis number |
| sp | pointer to storage for the output |
Implements yarp::dev::IEncoders.
Definition at line 203 of file ControlBoardCouplingHandler.cpp.
Read the instantaneous speed of all axes.
| spds | pointer to storage for the output values |
Implements yarp::dev::IEncoders.
Definition at line 218 of file ControlBoardCouplingHandler.cpp.
Read the instantaneous acceleration of all axes.
| encs | pointer to the array that will contain the output |
| time | pointer to the array that will contain individual timestamps |
Implements yarp::dev::IEncodersTimed.
Definition at line 167 of file ControlBoardCouplingHandler.cpp.
|
overridevirtual |
Read the instantaneous acceleration of all axes.
| j | axis index |
| encs | encoder value (pointer to) |
| time | corresponding timestamp (pointer to) |
Implements yarp::dev::IEncodersTimed.
Definition at line 187 of file ControlBoardCouplingHandler.cpp.
|
overridevirtual |
Reimplemented from yarp::dev::IAxisInfo.
Definition at line 291 of file ControlBoardCouplingHandler.cpp.
|
overridevirtual |
Open the device driver.
| prop | is a Searchable object which contains the parameters. Allowed parameters are described in the class documentation. |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 27 of file ControlBoardCouplingHandler.cpp.
|
delete |
|
delete |
ControlBoard methods.
Implements yarp::dev::IEncoders.
Definition at line 119 of file ControlBoardCouplingHandler.cpp.
|
overridevirtual |
Reset encoders.
Set the encoders value to zero
Implements yarp::dev::IEncoders.
Definition at line 124 of file ControlBoardCouplingHandler.cpp.
Set the value of the encoder for a given joint.
| j | encoder number |
| val | new value |
Implements yarp::dev::IEncoders.
Definition at line 129 of file ControlBoardCouplingHandler.cpp.
Set the value of all encoders.
| vals | pointer to the new values |
Implements yarp::dev::IEncoders.
Definition at line 134 of file ControlBoardCouplingHandler.cpp.
|
inline |
Return the value of the verbose flag.
Definition at line 73 of file ControlBoardCouplingHandler.h.