|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
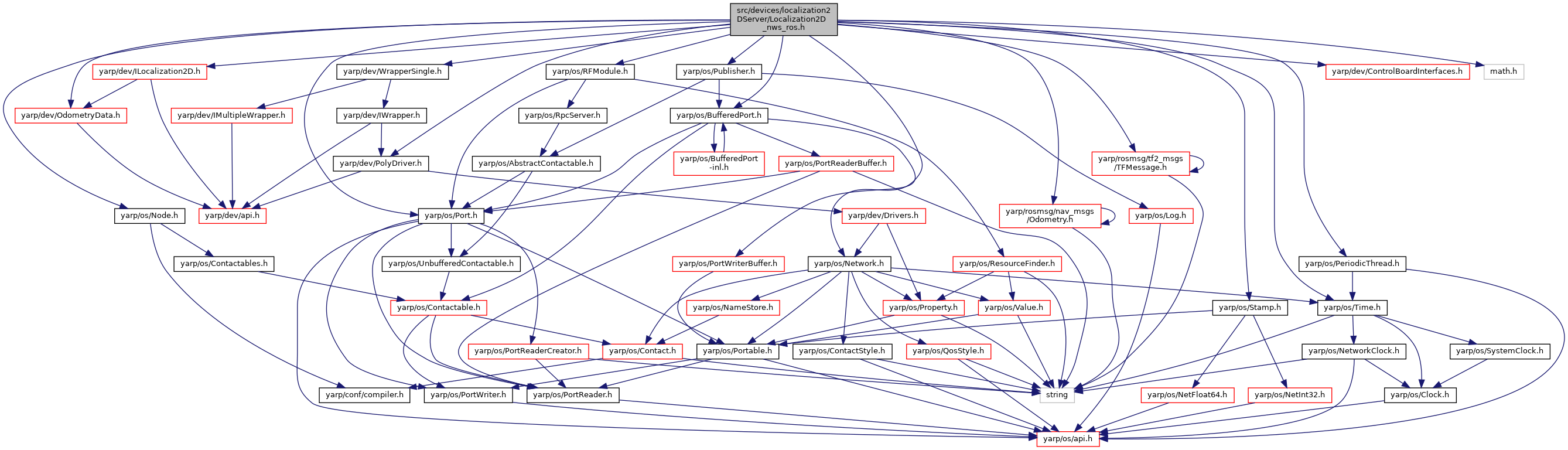
#include <yarp/os/Network.h>#include <yarp/os/RFModule.h>#include <yarp/os/Time.h>#include <yarp/os/Port.h>#include <yarp/os/Stamp.h>#include <yarp/os/Node.h>#include <yarp/os/Publisher.h>#include <yarp/os/BufferedPort.h>#include <yarp/os/PeriodicThread.h>#include <yarp/dev/PolyDriver.h>#include <yarp/dev/WrapperSingle.h>#include <yarp/dev/ControlBoardInterfaces.h>#include <yarp/dev/ILocalization2D.h>#include <yarp/dev/OdometryData.h>#include <yarp/rosmsg/nav_msgs/Odometry.h>#include <yarp/rosmsg/tf2_msgs/TFMessage.h>#include <math.h> Include dependency graph for Localization2D_nws_ros.h: This graph shows which files directly or indirectly include this file:
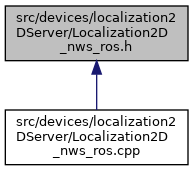
Include dependency graph for Localization2D_nws_ros.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | Localization2D_nws_ros |
localization2D_nws_ros: A localization server which can be wrap multiple algorithms and devices to provide robot localization in a 2D World. More... | |