|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
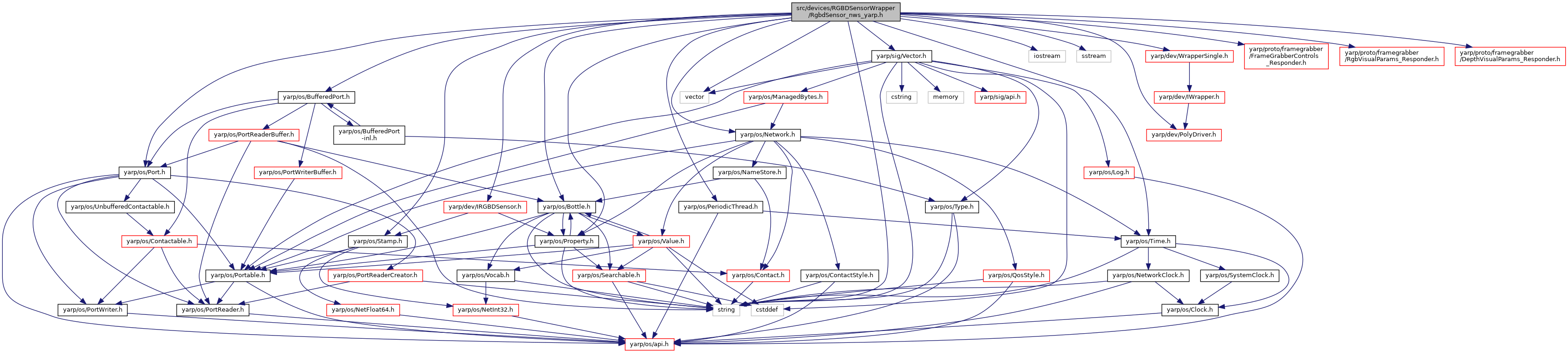
#include <vector>#include <iostream>#include <string>#include <sstream>#include <yarp/os/Port.h>#include <yarp/os/Time.h>#include <yarp/os/Stamp.h>#include <yarp/os/Bottle.h>#include <yarp/os/Network.h>#include <yarp/os/Property.h>#include <yarp/os/PeriodicThread.h>#include <yarp/os/BufferedPort.h>#include <yarp/sig/Vector.h>#include <yarp/dev/WrapperSingle.h>#include <yarp/dev/PolyDriver.h>#include <yarp/dev/IRGBDSensor.h>#include <yarp/proto/framegrabber/FrameGrabberControls_Responder.h>#include <yarp/proto/framegrabber/RgbVisualParams_Responder.h>#include <yarp/proto/framegrabber/DepthVisualParams_Responder.h> Include dependency graph for RgbdSensor_nws_yarp.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for RgbdSensor_nws_yarp.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | RGBDImpl::RGBDSensorParser |
| class | RgbdSensor_nws_yarp |
rgbdSensor_nws_yarp: A Network grabber for kinect-like devices. This device will produce two streams of data through different ports, one for the color frame and the other one for depth image following Framegrabber and IDepthSensor interfaces specification respectively. See they documentation for more details about each interface. More... | |
Namespaces | |
| RGBDImpl | |
Macros | |
| #define | DEFAULT_THREAD_PERIOD 0.03 |
| #define | RGBD_WRAPPER_PROTOCOL_VERSION_MAJOR 1 |
| #define | RGBD_WRAPPER_PROTOCOL_VERSION_MINOR 0 |
Variables | |
| constexpr yarp::conf::vocab32_t | RGBDImpl::VOCAB_PROTOCOL_VERSION = yarp::os::createVocab32('p', 'r', 'o', 't') |
| #define DEFAULT_THREAD_PERIOD 0.03 |
Definition at line 36 of file RgbdSensor_nws_yarp.h.
| #define RGBD_WRAPPER_PROTOCOL_VERSION_MAJOR 1 |
Definition at line 41 of file RgbdSensor_nws_yarp.h.
| #define RGBD_WRAPPER_PROTOCOL_VERSION_MINOR 0 |
Definition at line 42 of file RgbdSensor_nws_yarp.h.