|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
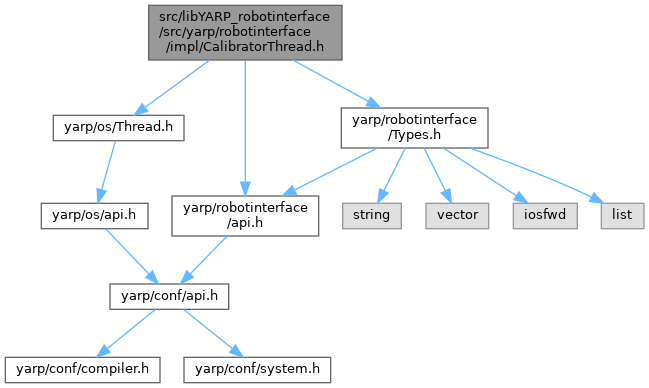
#include <yarp/robotinterface/api.h>#include <yarp/os/Thread.h>#include <yarp/robotinterface/Types.h> Include dependency graph for CalibratorThread.h: This graph shows which files directly or indirectly include this file:
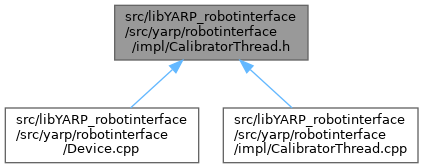
Include dependency graph for CalibratorThread.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | yarp::robotinterface::impl::CalibratorThread |
Namespaces | |
| namespace | yarp |
| The main, catch-all namespace for YARP. | |
| namespace | yarp::os |
| An interface to the operating system, including Port based communication. | |
| namespace | yarp::dev |
| For streams capable of holding different kinds of content, check what they actually have. | |
| namespace | yarp::robotinterface |
| namespace | yarp::robotinterface::impl |