|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
frameTransformGet_nwc_ros2: A ros network wrapper client that receives frame transforms from a ros2 topic and makes them available through an IFrameTransformStorageGet interface.
More...
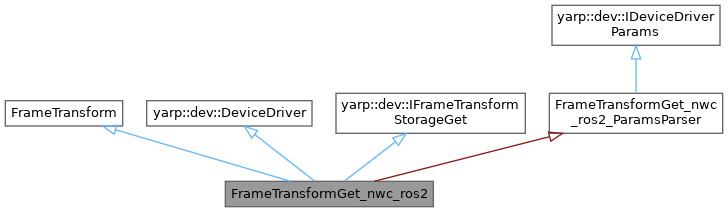
 Inheritance diagram for FrameTransformGet_nwc_ros2:
Inheritance diagram for FrameTransformGet_nwc_ros2:Public Member Functions | |
| ~FrameTransformGet_nwc_ros2 ()=default | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. | |
| bool | close () override |
| Close the DeviceDriver. | |
| yarp::dev::ReturnValue | getTransforms (std::vector< yarp::math::FrameTransform > &transforms) const override |
| Obtains all frame transforms saved in a storage. | |
| void | frameTransformTimedGet_callback (const tf2_msgs::msg::TFMessage::SharedPtr msg) |
| void | frameTransformStaticGet_callback (const tf2_msgs::msg::TFMessage::SharedPtr msg) |
| void | ros2TransformToYARP (const geometry_msgs::msg::TransformStamped &input, yarp::math::FrameTransform &output, bool isStatic) |
| bool | updateBuffer (const std::vector< geometry_msgs::msg::TransformStamped > &transforms, bool areStatic) |
| bool | setTransform (const yarp::math::FrameTransform &transform) |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| DeviceDriver () | |
| DeviceDriver (const DeviceDriver &other)=delete | |
| DeviceDriver (DeviceDriver &&other) noexcept=delete | |
| DeviceDriver & | operator= (const DeviceDriver &other)=delete |
| DeviceDriver & | operator= (DeviceDriver &&other) noexcept=delete |
| virtual | ~DeviceDriver () |
| virtual std::string | id () const |
| Return the id assigned to the PolyDriver. | |
| virtual void | setId (const std::string &id) |
| Set the id for this device. | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. | |
| Public Member Functions inherited from yarp::dev::IFrameTransformStorageGet | |
| virtual | ~IFrameTransformStorageGet () |
Public Attributes | |
| Ros2Spinner * | m_spinner {nullptr} |
frameTransformGet_nwc_ros2: A ros network wrapper client that receives frame transforms from a ros2 topic and makes them available through an IFrameTransformStorageGet interface.
See FrameTransform: start all the required devices needed for transforming frames for additional info.
Parameters required by this device are shown in class: FrameTransformGet_nwc_ros2_ParamsParser
N.B. pay attention to the difference between tf and ft
Definition at line 61 of file frameTransformGet_nwc_ros2.h.
|
default |
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 50 of file frameTransformGet_nwc_ros2.cpp.
| void FrameTransformGet_nwc_ros2::frameTransformStaticGet_callback | ( | const tf2_msgs::msg::TFMessage::SharedPtr | msg | ) |
Definition at line 81 of file frameTransformGet_nwc_ros2.cpp.
| void FrameTransformGet_nwc_ros2::frameTransformTimedGet_callback | ( | const tf2_msgs::msg::TFMessage::SharedPtr | msg | ) |
Definition at line 74 of file frameTransformGet_nwc_ros2.cpp.
|
overridevirtual |
Obtains all frame transforms saved in a storage.
| transforms | the returned list of frame transforms |
Implements yarp::dev::IFrameTransformStorageGet.
Definition at line 58 of file frameTransformGet_nwc_ros2.cpp.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 22 of file frameTransformGet_nwc_ros2.cpp.
| void FrameTransformGet_nwc_ros2::ros2TransformToYARP | ( | const geometry_msgs::msg::TransformStamped & | input, |
| yarp::math::FrameTransform & | output, | ||
| bool | isStatic | ||
| ) |
Definition at line 88 of file frameTransformGet_nwc_ros2.cpp.
| bool FrameTransformGet_nwc_ros2::setTransform | ( | const yarp::math::FrameTransform & | transform | ) |
| bool FrameTransformGet_nwc_ros2::updateBuffer | ( | const std::vector< geometry_msgs::msg::TransformStamped > & | transforms, |
| bool | areStatic | ||
| ) |
Definition at line 105 of file frameTransformGet_nwc_ros2.cpp.
| Ros2Spinner* FrameTransformGet_nwc_ros2::m_spinner {nullptr} |
Definition at line 74 of file frameTransformGet_nwc_ros2.h.