|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
Localization2D_nwc_yarp A device which allows a user application retrieve the current position of the robot in the world.
More...
#include <networkWrappers/localization2D_nwc_yarp/Localization2D_nwc_yarp.h>
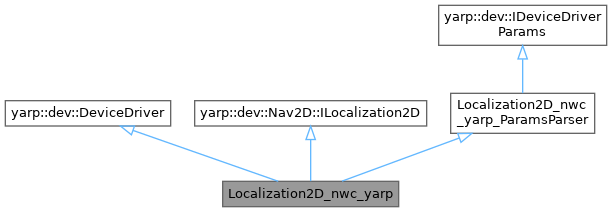
 Inheritance diagram for Localization2D_nwc_yarp:
Inheritance diagram for Localization2D_nwc_yarp:Public Member Functions | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. | |
| bool | close () override |
| Close the DeviceDriver. | |
| yarp::dev::ReturnValue | getCurrentPosition (yarp::dev::Nav2D::Map2DLocation &loc) override |
| Gets the current position of the robot w.r.t world reference frame. | |
| yarp::dev::ReturnValue | getEstimatedOdometry (yarp::dev::OdometryData &odom) override |
| Gets the estimated odometry the robot, including its velocity expressed in the world and in the local reference frame. | |
| yarp::dev::ReturnValue | setInitialPose (const yarp::dev::Nav2D::Map2DLocation &loc) override |
| Sets the initial pose for the localization algorithm which estimates the current position of the robot w.r.t world reference frame. | |
| yarp::dev::ReturnValue | getLocalizationStatus (yarp::dev::Nav2D::LocalizationStatusEnum &status) override |
| Gets the current status of the localization task. | |
| yarp::dev::ReturnValue | getEstimatedPoses (std::vector< yarp::dev::Nav2D::Map2DLocation > &poses) override |
| Gets a set of pose estimates computed by the localization algorithm. | |
| yarp::dev::ReturnValue | setInitialPose (const yarp::dev::Nav2D::Map2DLocation &loc, const yarp::sig::Matrix &cov) override |
| Sets the initial pose for the localization algorithm which estimates the current position of the robot w.r.t world reference frame. | |
| yarp::dev::ReturnValue | getCurrentPosition (yarp::dev::Nav2D::Map2DLocation &loc, yarp::sig::Matrix &cov) override |
| Gets the current position of the robot w.r.t world reference frame, plus the covariance. | |
| yarp::dev::ReturnValue | startLocalizationService () override |
| Starts the localization service. | |
| yarp::dev::ReturnValue | stopLocalizationService () override |
| Stops the localization service. | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| DeviceDriver () | |
| DeviceDriver (const DeviceDriver &other)=delete | |
| DeviceDriver (DeviceDriver &&other) noexcept=delete | |
| DeviceDriver & | operator= (const DeviceDriver &other)=delete |
| DeviceDriver & | operator= (DeviceDriver &&other) noexcept=delete |
| virtual | ~DeviceDriver () |
| virtual std::string | id () const |
| Return the id assigned to the PolyDriver. | |
| virtual void | setId (const std::string &id) |
| Set the id for this device. | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. | |
| Public Member Functions inherited from yarp::dev::Nav2D::ILocalization2D | |
| virtual | ~ILocalization2D () |
| Destructor. | |
| Public Member Functions inherited from Localization2D_nwc_yarp_ParamsParser | |
| Localization2D_nwc_yarp_ParamsParser () | |
| ~Localization2D_nwc_yarp_ParamsParser () override=default | |
| bool | parseParams (const yarp::os::Searchable &config) override |
| Parse the DeviceDriver parameters. | |
| std::string | getDeviceClassName () const override |
| Get the name of the DeviceDriver class. | |
| std::string | getDeviceName () const override |
| Get the name of the device (i.e. | |
| std::string | getDocumentationOfDeviceParams () const override |
| Get the documentation of the DeviceDriver's parameters. | |
| std::vector< std::string > | getListOfParams () const override |
| Return a list of all params used by the device. | |
| bool | getParamValue (const std::string ¶mName, std::string ¶mValue) const override |
| Return the value (represented as a string) of the requested parameter. | |
| std::string | getConfiguration () const override |
| Return the configuration of the device. | |
| Public Member Functions inherited from yarp::dev::IDeviceDriverParams | |
| virtual | ~IDeviceDriverParams () |
Protected Attributes | |
| std::mutex | m_mutex |
| yarp::os::Port | m_rpc_port_localization_server |
| ILocalization2DMsgs | m_RPC |
Additional Inherited Members | |
| Public Attributes inherited from Localization2D_nwc_yarp_ParamsParser | |
| const std::string | m_device_classname = {"Localization2D_nwc_yarp"} |
| const std::string | m_device_name = {"localization2D_nwc_yarp"} |
| bool | m_parser_is_strict = false |
| const parser_version_type | m_parser_version = {} |
| std::string | m_provided_configuration |
| const std::string | m_local_defaultValue = {""} |
| const std::string | m_remote_defaultValue = {""} |
| std::string | m_local = {} |
| std::string | m_remote = {} |
Localization2D_nwc_yarp A device which allows a user application retrieve the current position of the robot in the world.
Parameters required by this device are shown in class: Localization2D_nwc_yarp_ParamsParser
Definition at line 36 of file Localization2D_nwc_yarp.h.
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 174 of file Localization2D_nwc_yarp.cpp.
|
overridevirtual |
Gets the current position of the robot w.r.t world reference frame.
| loc | the location of the robot |
Implements yarp::dev::Nav2D::ILocalization2D.
Definition at line 109 of file Localization2D_nwc_yarp.cpp.
|
overridevirtual |
Gets the current position of the robot w.r.t world reference frame, plus the covariance.
| loc | the location of the robot |
| cov | the 3x3 covariance matrix |
Implements yarp::dev::Nav2D::ILocalization2D.
Definition at line 122 of file Localization2D_nwc_yarp.cpp.
|
overridevirtual |
Gets the estimated odometry the robot, including its velocity expressed in the world and in the local reference frame.
| loc | the estimated odometry. |
Implements yarp::dev::Nav2D::ILocalization2D.
Definition at line 96 of file Localization2D_nwc_yarp.cpp.
|
overridevirtual |
Gets a set of pose estimates computed by the localization algorithm.
Implements yarp::dev::Nav2D::ILocalization2D.
Definition at line 136 of file Localization2D_nwc_yarp.cpp.
|
overridevirtual |
Gets the current status of the localization task.
Implements yarp::dev::Nav2D::ILocalization2D.
Definition at line 149 of file Localization2D_nwc_yarp.cpp.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 26 of file Localization2D_nwc_yarp.cpp.
|
overridevirtual |
Sets the initial pose for the localization algorithm which estimates the current position of the robot w.r.t world reference frame.
| loc | the location of the robot |
Implements yarp::dev::Nav2D::ILocalization2D.
Definition at line 78 of file Localization2D_nwc_yarp.cpp.
|
overridevirtual |
Sets the initial pose for the localization algorithm which estimates the current position of the robot w.r.t world reference frame.
| loc | the location of the robot |
| cov | the 3x3 covariance matrix |
Implements yarp::dev::Nav2D::ILocalization2D.
Definition at line 84 of file Localization2D_nwc_yarp.cpp.
|
overridevirtual |
Starts the localization service.
Implements yarp::dev::Nav2D::ILocalization2D.
Definition at line 162 of file Localization2D_nwc_yarp.cpp.
|
overridevirtual |
Stops the localization service.
Implements yarp::dev::Nav2D::ILocalization2D.
Definition at line 168 of file Localization2D_nwc_yarp.cpp.
|
protected |
Definition at line 42 of file Localization2D_nwc_yarp.h.
|
protected |
Definition at line 44 of file Localization2D_nwc_yarp.h.
|
protected |
Definition at line 43 of file Localization2D_nwc_yarp.h.