 |
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
 Collaboration diagram for Examples of common NWS/NWC Architectures:
Collaboration diagram for Examples of common NWS/NWC Architectures:NWS and NWC logic is discussed here. In this page we show some practical examples with graphical diagrams which depict common use cases.
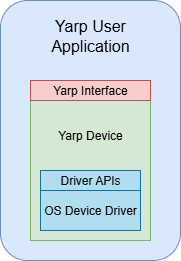
Example 1 shows a basic example where a user application (e.g. an executable) instantiates a YARP device driver (using the yarp::os::Polydriver class, see the devices tutorial ). Let's suppose that the device in this example is a RGB Camera. The YARP device controls the hardware through a set of APIs (provided by the hardware vendor). The user application communicates with the YARP device using the interface exposed by the device, for example:
Example 1 is self-contained: the user controls the physical device device through the YARP interface and no network communication is involved.
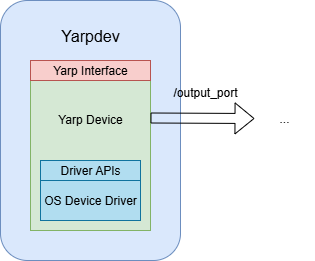
This example shows a primitive network communication, where the YARP device also implements a streaming port which periodically publishes the camera output. This approach has the main fallback that it mixes device management logic (communication with the OS device driver) and YARP network communication. If the network protocol needs to be modified or extended, modification to the device logic could be required. The developer must be thus careful to separate the control flow on different threads and protect the shared variable with mutexes, resulting in code complexity. Additionally, the system scales poorly if we want to extend the communication protocol to other middlewares: the device should link external libraries and implement complex enabling logic for each communication channels.
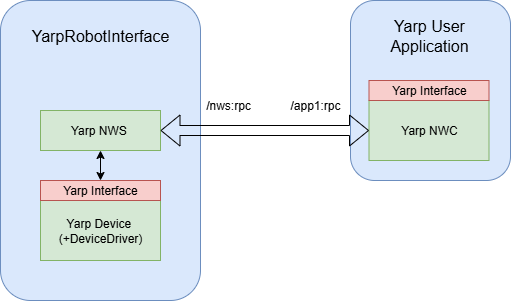
This example shows the basic approach where the control of the device driver is remotized using a NWS/NWC couple. The user application opens a NWC device, which exposes the same identical interface of the physical camera. When a command is sent to this interface, the NWC sends it to the NWS using a RPC port, and the NWS sends it to the physical device.
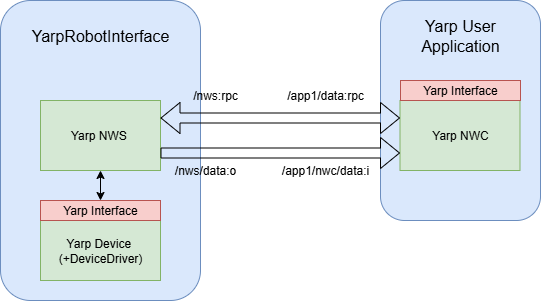
Note: while a get/set communication can be completely handled using an RPC port, some NWS/NWC pairs uses a mix of RPC and streaming ports to minimize latency (Example 3b). For example a NWS can implement a
periodic thread which continuously "extracts" data from the physical device and publishes it on an YARP port (see also Example 2). The NWC receives this data using a callback and caches it locally, so that it will be ready to provide it to the user on the next request (without sending an RPC and waiting for the reply)
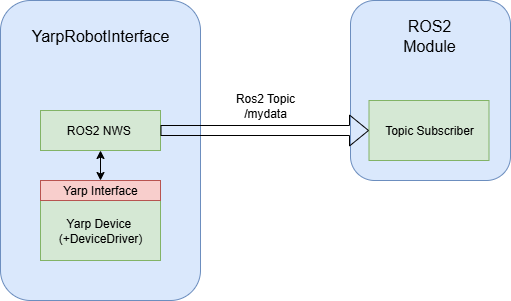
One major advantage of the separation between the logic of the device driver and the network communication is that that the architecture can be easily extended to other middlewares. Example4 shows a typical ROS/ROS2 publisher which is attached to the same YARP interface used in the previous examples. In this case a ROS application subscribes to the topic opened by the ROS2 NWS. The latter will be implemented as a thread which periodically gets data from the YARP device and publishes it on the network.
The dual example is shown in Example 4b. A YARP module can receive data from ROS2 using a ROS2 NWC which "emulates" a YARP Device. Also more complex structures can be achieved: for example user can receive data using a ROS2 NWC, elaborate data inside a custom device and republish it in ROS2 using a NWS...

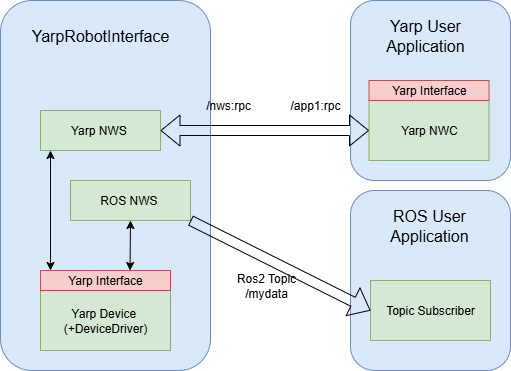
The previous example can be extended so that multiple NWSs can be attached to the same device to provide simultaneously network communication though different middlewares. Example 5a demonstrates the simultaneous usage of a YARP NWS and a ROS2 NWS, so that the same camera device is exposed to both middlewares.
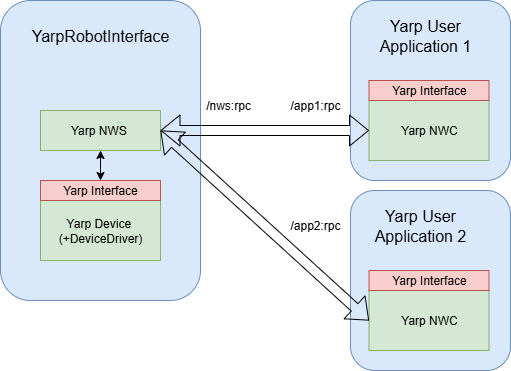
Multiple NWCs, opened by the different user applications, can be served by the same NWS. This is very convenient to centralize the access to the hardware in a single point, and distribute data to multiple machine connected to the network. However, it must be remembered that the network bandwidth (especially through a wifi) is a limited resource, and that each YARP NWS/NWC pair which implements a streaming port will consume a portion of it.
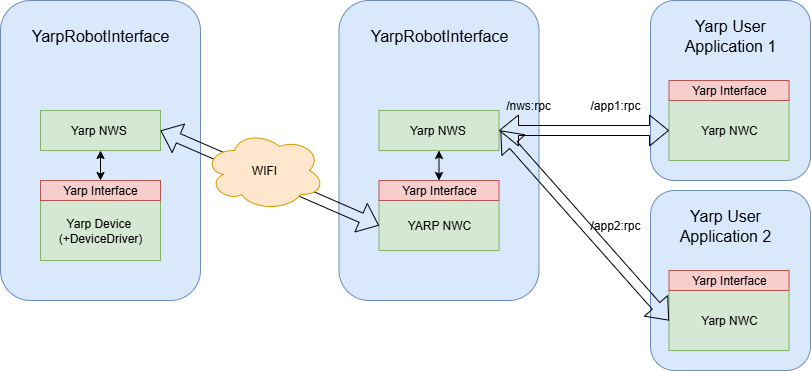
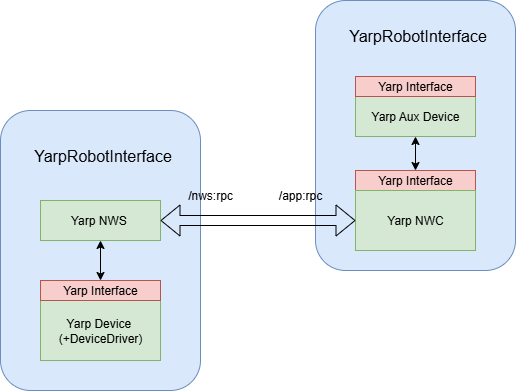
To address the bandwidth issues discussed in Example 5b, the "repeater" strategy illustrated in Example 6 can be used. Suppose there is a device physically connected to a machine, and the goal is to stream data from this device to two applications running on an machine connected via a Wi-Fi network. If both applications are directly connected to the Network Wrapper Server (NWS), two separate data streams are created over the network, effectively doubling the bandwidth consumption. To reduce this, we instantiate an additional yarprobotinterface on the client side of the Wi-Fi connection. This interface includes another NWS connected to a Network Wrapper Client (NWC). This is a valid setup because the NWC provides a YARP interface identical to that of the original physical device. With this configuration, the new yarprobotinterface acts as a repeater, forwarding data over the network. As a result, only one data stream is established across the Wi-Fi connection, significantly reducing bandwidth usage.
It is important to notice that it is not mandatory to connect a NWS directly to physical YARP device. Instead, it can be attached to any component, as long as they share the same YARP interfaces. In some cases, it is convenient to attach a device between the physical device and the NWS to perform some computations, data reordering, etc.
Few examples in YARP are the ControlBoardRemapper device, which is used to swap the orders of the joint in a motionControl joints or the cerDoubleLidar device which creates a virtual lidar, with measurements obtained by multiple devices. These virtual devices expose the same identical interface of the physical ones.
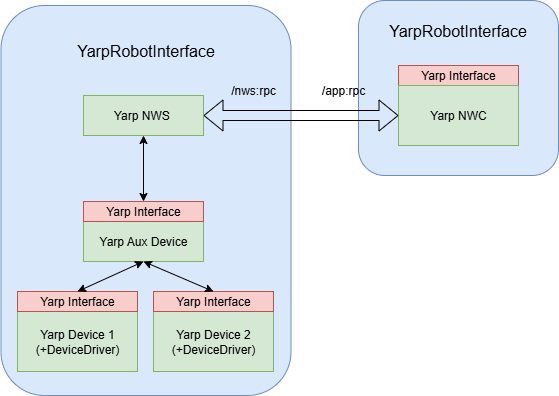
The same logic can be replicated also on the NWC side, implementing a auxiliary device which performs remapping or other operations. An example in YARP is the RemoteControlBoardRemapper device.
This example is useless! It does not help in any particular case! However it recaps two specific features of the NWS/NWC architecture:
– Since the NWC replicates the same interface of the YARP devices, chains of interconnected NWS/NWC pairs can extend infinitely.
– YARP NWSs can be connected to YARP NWCs also inside a yarprobotinterface instance, they will use YARP port identical to external connections (a shmem carrier or unixSocket carrier can be used to share memory, minimizing latency). See also the carriers page.

– Python language can be integrated inside a C++ YARP device, see FakePythonSpeechTranscription example.
– YARP NWS and NWC might include a version check in their open() to verify if they implement the same communication protocol. If the check fails, the connection might be refused.
– YARP NWC typically implements an automatic connection to the NWS in its open(). If the NWS is terminated, this connection might be interrupted as well (and not automatically restored).
– The communication between YARP NWS and NWC might use different YARP carriers or even portmonitors. Typically, the user can select the preferred option through the NWC parameters.
– An NWS device can attach only to a single device (it derives from class yarp::dev::WrapperSingle). Indeed, if multiple devices need to be remotized, it means that some logic is involved, hence a remapper similar to the one presented in Example 7 is required.
– It is recommended that NWS and NWC devices use the yarpDeviceParamParserGenerator: YARP code generator/compiler for parameters parsers to internally generate the parameters parsers and to document their available options.
– A single yarprobotinterface can open tens of devices simultaneously and perform very intricate connections between them! See for example this xml file. The command line executable yarpRobotDescriptionInfo can be a useful tool to inspect the devices instantiated by yarprobotinterface and display a graphical diagram of their connections.
