|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
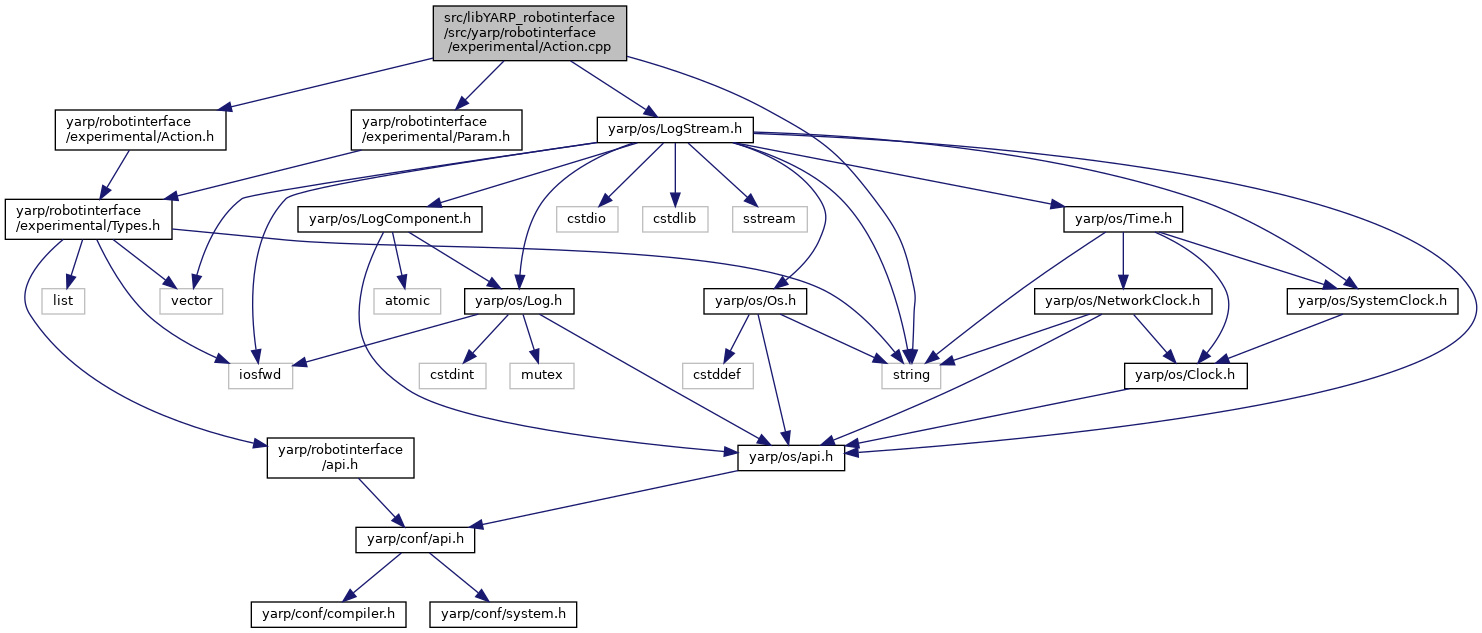
#include <yarp/robotinterface/experimental/Action.h>#include <yarp/robotinterface/experimental/Param.h>#include <yarp/os/LogStream.h>#include <string> Include dependency graph for Action.cpp:
Include dependency graph for Action.cpp:Go to the source code of this file.
Classes | |
| class | yarp::robotinterface::experimental::Action::Private |
Functions | |
| yarp::os::LogStream | operator<< (yarp::os::LogStream dbg, const yarp::robotinterface::experimental::Action &t) |
| yarp::os::LogStream operator<< | ( | yarp::os::LogStream | dbg, |
| const yarp::robotinterface::experimental::Action & | t | ||
| ) |
Definition at line 47 of file Action.cpp.
 1.9.1
1.9.1