|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
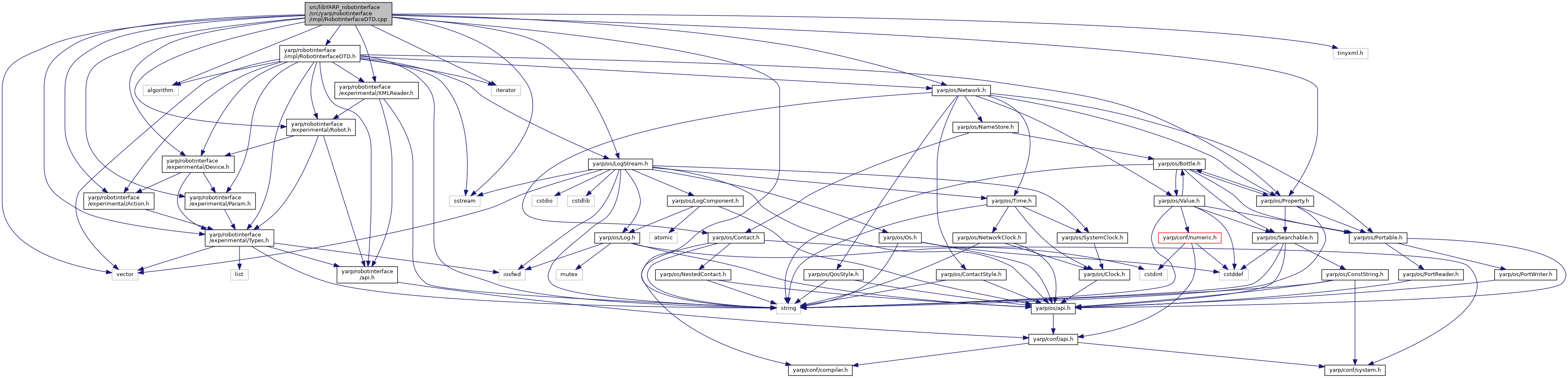
#include <yarp/robotinterface/impl/RobotInterfaceDTD.h>#include <yarp/robotinterface/experimental/Action.h>#include <yarp/robotinterface/experimental/Device.h>#include <yarp/robotinterface/experimental/Param.h>#include <yarp/robotinterface/experimental/Robot.h>#include <yarp/robotinterface/experimental/Types.h>#include <yarp/robotinterface/experimental/XMLReader.h>#include <yarp/os/LogStream.h>#include <yarp/os/Network.h>#include <yarp/os/Property.h>#include <algorithm>#include <iterator>#include <sstream>#include <string>#include <tinyxml.h>#include <vector> Include dependency graph for RobotInterfaceDTD.cpp:
Include dependency graph for RobotInterfaceDTD.cpp:Go to the source code of this file.
Namespaces | |
| yarp | |
| The main, catch-all namespace for YARP. | |
| yarp::robotinterface | |
Macros | |
| #define | SYNTAX_ERROR(line) yFatal() << "Syntax error while loading" << curr_filename << "at line" << line << "." |
| #define | SYNTAX_WARNING(line) yWarning() << "Invalid syntax while loading" << curr_filename << "at line" << line << "." |
Functions | |
| RobotInterfaceDTD::DocType | yarp::robotinterface::StringToDocType (const std::string &type) |
| std::string | yarp::robotinterface::DocTypeToString (RobotInterfaceDTD::DocType doctype) |
| #define SYNTAX_ERROR | ( | line | ) | yFatal() << "Syntax error while loading" << curr_filename << "at line" << line << "." |
Definition at line 29 of file RobotInterfaceDTD.cpp.
| #define SYNTAX_WARNING | ( | line | ) | yWarning() << "Invalid syntax while loading" << curr_filename << "at line" << line << "." |
Definition at line 30 of file RobotInterfaceDTD.cpp.
 1.9.1
1.9.1