|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
Interface for control boards implementing direct velocity control. More...
#include <yarp/dev/IVelocityDirect.h>
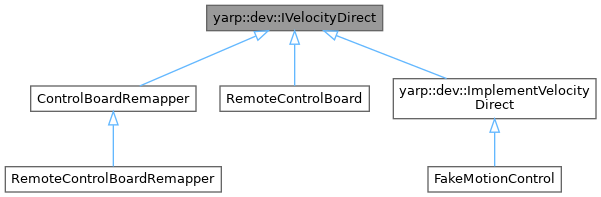
 Inheritance diagram for yarp::dev::IVelocityDirect:
Inheritance diagram for yarp::dev::IVelocityDirect:Public Member Functions | |
| virtual | ~IVelocityDirect () |
| Destructor. | |
| virtual yarp::dev::ReturnValue | getAxes (size_t &axes)=0 |
| Get the number of controlled axes. | |
| virtual yarp::dev::ReturnValue | setDesiredVelocity (int jnt, double vel)=0 |
| Set the velocity of single joint. | |
| virtual yarp::dev::ReturnValue | setDesiredVelocity (const std::vector< double > &vels)=0 |
| Set the velocity of all joints. | |
| virtual yarp::dev::ReturnValue | setDesiredVelocity (const std::vector< int > &jnts, const std::vector< double > &vels)=0 |
| Set the velocity of a subset of joints. | |
| virtual yarp::dev::ReturnValue | getDesiredVelocity (const int jnt, double &vel)=0 |
| Get the last reference velocity set by setDesiredVelocity() for a single joint. | |
| virtual yarp::dev::ReturnValue | getDesiredVelocity (std::vector< double > &vels)=0 |
| Get the last reference velocity set by setDesiredVelocity() for all joints. | |
| virtual yarp::dev::ReturnValue | getDesiredVelocity (const std::vector< int > &jnts, std::vector< double > &vels)=0 |
| Get the last reference velocity set by setDesiredVelocity() for a group of joints. | |
Interface for control boards implementing direct velocity control.
Definition at line 88 of file IVelocityDirect.h.
|
inlinevirtual |
Destructor.
Definition at line 94 of file IVelocityDirect.h.
|
pure virtual |
Get the number of controlled axes.
| axes | returned number of controllable axes |
Implemented in ControlBoardRemapper, FakeMotionControl, RemoteControlBoard, and yarp::dev::ImplementVelocityDirect.
|
pure virtual |
Get the last reference velocity set by setDesiredVelocity() for a single joint.
| jnt | joint number |
| vel | returns the velocity reference for the specified joint. |
Implemented in ControlBoardRemapper, RemoteControlBoard, and yarp::dev::ImplementVelocityDirect.
|
pure virtual |
Get the last reference velocity set by setDesiredVelocity() for a group of joints.
| jnts | vector containing the ids of the joints to control. |
| vels | vector containing the velocity references of the joints belonging to the required subset. |
Implemented in ControlBoardRemapper, RemoteControlBoard, and yarp::dev::ImplementVelocityDirect.
|
pure virtual |
Get the last reference velocity set by setDesiredVelocity() for all joints.
| vels | vector containing the velocity references of all joints. |
Implemented in ControlBoardRemapper, RemoteControlBoard, and yarp::dev::ImplementVelocityDirect.
|
pure virtual |
Set the velocity of all joints.
| vels | vector containing joint velocities for all joints |
Implemented in ControlBoardRemapper, RemoteControlBoard, and yarp::dev::ImplementVelocityDirect.
|
pure virtual |
Set the velocity of a subset of joints.
| jnts | vector containing the ids of the joints to control. |
| vels | vector containing the joint velocities for the required subset. |
Implemented in ControlBoardRemapper, RemoteControlBoard, and yarp::dev::ImplementVelocityDirect.
|
pure virtual |
Set the velocity of single joint.
| jnt | joint number |
| vel | speed value |
Implemented in ControlBoardRemapper, RemoteControlBoard, and yarp::dev::ImplementVelocityDirect.