#include <yarp/dev/ImplementJointBrake.h>
Definition at line 16 of file ImplementJointBrake.h.
◆ ImplementJointBrake()
◆ ~ImplementJointBrake()
| ImplementJointBrake::~ImplementJointBrake |
( |
| ) |
|
|
virtual |
◆ getAutoBrakeEnabled()
checks if the automatic joint brake mode is enabled or disabled.
- Parameters
-
| j | joint number |
| enabled | is true the automatic joint brake mode is enabled |
- Returns
- : true/false success failure.
Implements yarp::dev::IJointBrake.
Definition at line 74 of file ImplementJointBrake.cpp.
◆ initialize()
Initialize the internal data and alloc memory.
- Parameters
-
| size | is the number of controlled axes the driver deals with. |
| amap | is a lookup table mapping axes onto physical drivers. |
- Returns
- true if initialized succeeded, false if it wasn't executed, or assert.
Definition at line 25 of file ImplementJointBrake.cpp.
◆ isJointBraked()
Check is the joint brake is currently active.
- Parameters
-
| j | joint number |
| braked | is true if the joint is currently braked |
- Returns
- : true/false success failure.
Implements yarp::dev::IJointBrake.
Definition at line 53 of file ImplementJointBrake.cpp.
◆ setAutoBrakeEnabled()
Enables/Disables the automatic joint brake.
If enabled, the firmware can automatically choose when to enable the joint brake (for example when the joint is in hardware_fault mode).
- Parameters
-
| j | joint number |
| enabled | true to enable the automatic joint brake |
- Returns
- : true/false success failure.
Implements yarp::dev::IJointBrake.
Definition at line 67 of file ImplementJointBrake.cpp.
◆ setManualBrakeActive()
◆ uninitialize()
| bool ImplementJointBrake::uninitialize |
( |
| ) |
|
|
protected |
Clean up internal data and memory.
- Returns
- true if uninitialization is executed, false otherwise.
Definition at line 42 of file ImplementJointBrake.cpp.
◆ helper
| void* yarp::dev::ImplementJointBrake::helper |
|
protected |
◆ raw
The documentation for this class was generated from the following files:


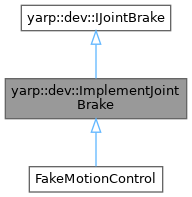
 Inheritance diagram for yarp::dev::ImplementJointBrake:
Inheritance diagram for yarp::dev::ImplementJointBrake: