|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
Interface for controlling a joint equipped with brakes (hardware or simulated). More...
#include <yarp/dev/IJointBrake.h>
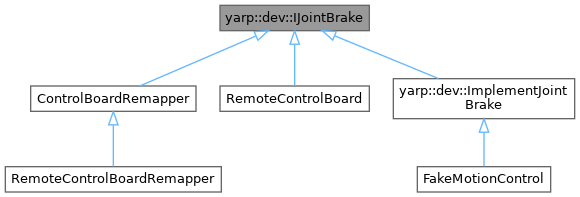
 Inheritance diagram for yarp::dev::IJointBrake:
Inheritance diagram for yarp::dev::IJointBrake:Public Member Functions | |
| virtual | ~IJointBrake () |
| virtual yarp::dev::ReturnValue | isJointBraked (int j, bool &braked) const =0 |
| Check is the joint brake is currently active. | |
| virtual yarp::dev::ReturnValue | setManualBrakeActive (int j, bool active)=0 |
| Enables/Disables manually the joint brake. | |
| virtual yarp::dev::ReturnValue | setAutoBrakeEnabled (int j, bool enabled)=0 |
| Enables/Disables the automatic joint brake. | |
| virtual yarp::dev::ReturnValue | getAutoBrakeEnabled (int j, bool &enabled) const =0 |
| checks if the automatic joint brake mode is enabled or disabled. | |
Interface for controlling a joint equipped with brakes (hardware or simulated).
Definition at line 22 of file IJointBrake.h.
|
inlinevirtual |
Definition at line 25 of file IJointBrake.h.
|
pure virtual |
checks if the automatic joint brake mode is enabled or disabled.
| j | joint number |
| enabled | is true the automatic joint brake mode is enabled |
Implemented in ControlBoardRemapper, RemoteControlBoard, and yarp::dev::ImplementJointBrake.
|
pure virtual |
Check is the joint brake is currently active.
| j | joint number |
| braked | is true if the joint is currently braked |
Implemented in ControlBoardRemapper, RemoteControlBoard, and yarp::dev::ImplementJointBrake.
|
pure virtual |
Enables/Disables the automatic joint brake.
If enabled, the firmware can automatically choose when to enable the joint brake (for example when the joint is in hardware_fault mode).
| j | joint number |
| enabled | true to enable the automatic joint brake |
Implemented in ControlBoardRemapper, RemoteControlBoard, and yarp::dev::ImplementJointBrake.
|
pure virtual |
Enables/Disables manually the joint brake.
| j | joint number |
| active | true to enable the joint brake |
Implemented in ControlBoardRemapper, RemoteControlBoard, and yarp::dev::ImplementJointBrake.