#include <vector>
#include <iostream>
#include <string>
#include <sstream>
#include <yarp/os/Port.h>
#include <yarp/os/Time.h>
#include <yarp/os/Stamp.h>
#include <yarp/os/Network.h>
#include <yarp/os/Property.h>
#include <yarp/os/PeriodicThread.h>
#include <yarp/sig/Vector.h>
#include <yarp/dev/WrapperSingle.h>
#include <yarp/dev/PolyDriver.h>
#include <yarp/dev/IRGBDSensor.h>
#include <yarp/dev/IFrameGrabberControls.h>
#include <yarp/os/Node.h>
#include <yarp/os/Publisher.h>
#include <yarp/os/Subscriber.h>
#include <yarp/rosmsg/TickTime.h>
#include <yarp/rosmsg/sensor_msgs/PointCloud2.h>
Go to the source code of this file.
|
| class | RGBDToPointCloudSensor_nws_ros |
| | RGBDToPointCloudSensor_nws_ros: A Network grabber for kinect-like devices. This device will produce one stream of data for the point cloud derived fron the combination of the data derived from Framegrabber and IDepthSensor interfaces. See they documentation for more details about each interface. More...
|
| |
◆ DEFAULT_THREAD_PERIOD
| constexpr double DEFAULT_THREAD_PERIOD = 0.033 |
|
constexpr |


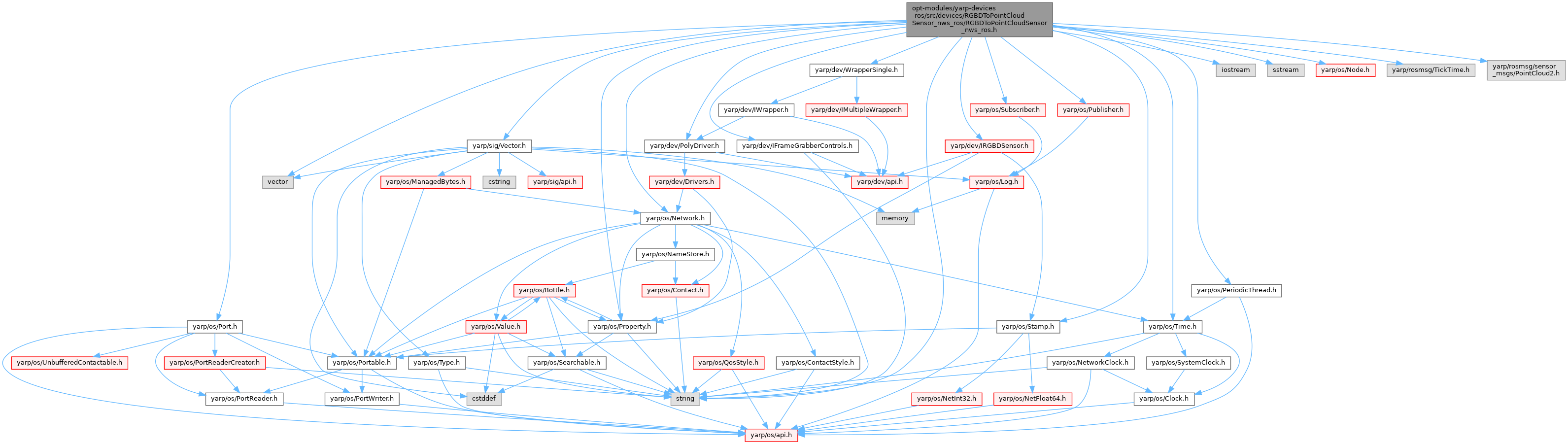
 Include dependency graph for RGBDToPointCloudSensor_nws_ros.h:
Include dependency graph for RGBDToPointCloudSensor_nws_ros.h: