|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
fakeDepthCamera: Documentation to be added
More...
#include <fake/fakeDepthCamera/FakeDepthCameraDriver.h>
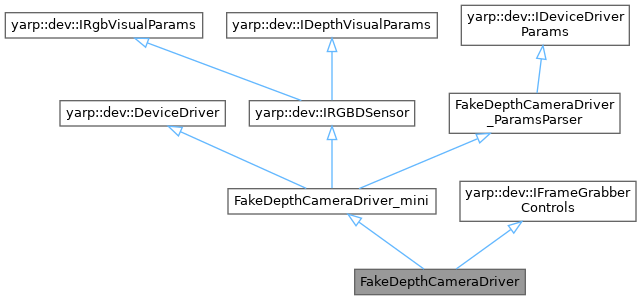
 Inheritance diagram for FakeDepthCameraDriver:
Inheritance diagram for FakeDepthCameraDriver:Public Member Functions | |
| FakeDepthCameraDriver () | |
| ~FakeDepthCameraDriver () override | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. | |
| bool | close () override |
| Close the DeviceDriver. | |
| yarp::dev::ReturnValue | getCameraDescription (yarp::dev::CameraDescriptor &camera) override |
| Get a basic description of the camera hw. | |
| yarp::dev::ReturnValue | hasFeature (yarp::dev::cameraFeature_id_t feature, bool &hasFeature) override |
| Check if camera has the requested feature (saturation, brightness ... ) | |
| yarp::dev::ReturnValue | setFeature (yarp::dev::cameraFeature_id_t feature, double value) override |
| Set the requested feature to a value (saturation, brightness ... ) | |
| yarp::dev::ReturnValue | getFeature (yarp::dev::cameraFeature_id_t feature, double &value) override |
| Get the current value for the requested feature. | |
| yarp::dev::ReturnValue | setFeature (yarp::dev::cameraFeature_id_t feature, double value1, double value2) override |
| Set the requested feature to a value using 2 params (like white balance) | |
| yarp::dev::ReturnValue | getFeature (yarp::dev::cameraFeature_id_t feature, double &value1, double &value2) override |
| Get the current value for the requested feature. | |
| yarp::dev::ReturnValue | hasOnOff (yarp::dev::cameraFeature_id_t feature, bool &HasOnOff) override |
| Check if the camera has the ability to turn on/off the requested feature. | |
| yarp::dev::ReturnValue | setActive (yarp::dev::cameraFeature_id_t feature, bool onoff) override |
| Set the requested feature on or off. | |
| yarp::dev::ReturnValue | getActive (yarp::dev::cameraFeature_id_t feature, bool &isActive) override |
| Get the current status of the feature, on or off. | |
| yarp::dev::ReturnValue | hasAuto (yarp::dev::cameraFeature_id_t feature, bool &hasAuto) override |
| Check if the requested feature has the 'auto' mode. | |
| yarp::dev::ReturnValue | hasManual (yarp::dev::cameraFeature_id_t feature, bool &hasManual) override |
| Check if the requested feature has the 'manual' mode. | |
| yarp::dev::ReturnValue | hasOnePush (yarp::dev::cameraFeature_id_t feature, bool &hasOnePush) override |
| Check if the requested feature has the 'onePush' mode. | |
| yarp::dev::ReturnValue | setMode (yarp::dev::cameraFeature_id_t feature, yarp::dev::FeatureMode mode) override |
| Set the requested mode for the feature. | |
| yarp::dev::ReturnValue | getMode (yarp::dev::cameraFeature_id_t feature, yarp::dev::FeatureMode &mode) override |
| Get the current mode for the feature. | |
| yarp::dev::ReturnValue | setOnePush (yarp::dev::cameraFeature_id_t feature) override |
| Set the requested feature to a value (saturation, brightness ... ) | |
| Public Member Functions inherited from FakeDepthCameraDriver_mini | |
| FakeDepthCameraDriver_mini () | |
| ~FakeDepthCameraDriver_mini () override | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. | |
| bool | close () override |
| Close the DeviceDriver. | |
| int | getRgbHeight () override |
| Return the height of each frame. | |
| int | getRgbWidth () override |
| Return the width of each frame. | |
| yarp::dev::ReturnValue | getRgbSupportedConfigurations (std::vector< yarp::dev::CameraConfig > &configurations) override |
| Get the possible configurations of the camera. | |
| yarp::dev::ReturnValue | getRgbResolution (int &width, int &height) override |
| Get the resolution of the rgb image from the camera. | |
| yarp::dev::ReturnValue | setRgbResolution (int width, int height) override |
| Set the resolution of the rgb image from the camera. | |
| yarp::dev::ReturnValue | getRgbFOV (double &horizontalFov, double &verticalFov) override |
| Get the field of view (FOV) of the rgb camera. | |
| yarp::dev::ReturnValue | setRgbFOV (double horizontalFov, double verticalFov) override |
| Set the field of view (FOV) of the rgb camera. | |
| yarp::dev::ReturnValue | getRgbMirroring (bool &mirror) override |
| Get the mirroring setting of the sensor. | |
| yarp::dev::ReturnValue | setRgbMirroring (bool mirror) override |
| Set the mirroring setting of the sensor. | |
| yarp::dev::ReturnValue | getRgbIntrinsicParam (Property &intrinsic) override |
| Get the intrinsic parameters of the rgb camera. | |
| int | getDepthHeight () override |
| Return the height of each frame. | |
| int | getDepthWidth () override |
| Return the height of each frame. | |
| yarp::dev::ReturnValue | getDepthResolution (int &width, int &height) override |
| Get the resolution of the depth image from the camera. | |
| yarp::dev::ReturnValue | setDepthResolution (int width, int height) override |
| Set the resolution of the depth image from the camera. | |
| yarp::dev::ReturnValue | getDepthFOV (double &horizontalFov, double &verticalFov) override |
| Get the field of view (FOV) of the depth camera. | |
| yarp::dev::ReturnValue | setDepthFOV (double horizontalFov, double verticalFov) override |
| Set the field of view (FOV) of the depth camera. | |
| yarp::dev::ReturnValue | getDepthIntrinsicParam (Property &intrinsic) override |
| Get the intrinsic parameters of the depth camera. | |
| yarp::dev::ReturnValue | getDepthAccuracy (double &accuracy) override |
| Get the minimum detectable variation in distance [meter]. | |
| yarp::dev::ReturnValue | setDepthAccuracy (double accuracy) override |
| Set the minimum detectable variation in distance [meter] when possible. | |
| yarp::dev::ReturnValue | getDepthClipPlanes (double &nearPlane, double &farPlane) override |
| Get the clipping planes of the sensor. | |
| yarp::dev::ReturnValue | setDepthClipPlanes (double nearPlane, double farPlane) override |
| Set the clipping planes of the sensor. | |
| yarp::dev::ReturnValue | getDepthMirroring (bool &mirror) override |
| Get the mirroring setting of the sensor. | |
| yarp::dev::ReturnValue | setDepthMirroring (bool mirror) override |
| Set the mirroring setting of the sensor. | |
| yarp::dev::ReturnValue | getExtrinsicParam (yarp::sig::Matrix &extrinsic) override |
| Get the extrinsic parameters from the device. | |
| yarp::dev::ReturnValue | getRgbImage (FlexImage &rgbImage, Stamp *timeStamp=nullptr) override |
| Get the rgb frame from the device. | |
| yarp::dev::ReturnValue | getDepthImage (depthImage &depthImage, Stamp *timeStamp=nullptr) override |
| yarp::dev::ReturnValue | getImages (FlexImage &colorFrame, depthImage &depthFrame, Stamp *colorStamp=nullptr, Stamp *depthStamp=nullptr) override |
| yarp::dev::ReturnValue | getSensorStatus (RGBDSensor_status &status) override |
| yarp::dev::ReturnValue | getLastErrorMsg (std::string &mesg, Stamp *timeStamp=nullptr) override |
| Return an error message in case of error. | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| DeviceDriver () | |
| DeviceDriver (const DeviceDriver &other)=delete | |
| DeviceDriver (DeviceDriver &&other) noexcept=delete | |
| DeviceDriver & | operator= (const DeviceDriver &other)=delete |
| DeviceDriver & | operator= (DeviceDriver &&other) noexcept=delete |
| virtual | ~DeviceDriver () |
| virtual std::string | id () const |
| Return the id assigned to the PolyDriver. | |
| virtual void | setId (const std::string &id) |
| Set the id for this device. | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. | |
| Public Member Functions inherited from yarp::dev::IRGBDSensor | |
| virtual | ~IRGBDSensor () |
| virtual yarp::dev::ReturnValue | getDepthImage (yarp::sig::ImageOf< yarp::sig::PixelFloat > &depthImage, yarp::os::Stamp *timeStamp=nullptr)=0 |
| Get the depth frame from the device. | |
| virtual yarp::dev::ReturnValue | getImages (yarp::sig::FlexImage &colorFrame, yarp::sig::ImageOf< yarp::sig::PixelFloat > &depthFrame, yarp::os::Stamp *colorStamp=nullptr, yarp::os::Stamp *depthStamp=nullptr)=0 |
| Get the both the color and depth frame in a single call. | |
| virtual yarp::dev::ReturnValue | getSensorStatus (RGBDSensor_status &status)=0 |
| Get the current status of the sensor, using enum type. | |
| Public Member Functions inherited from yarp::dev::IRgbVisualParams | |
| virtual | ~IRgbVisualParams () |
| Public Member Functions inherited from yarp::dev::IDepthVisualParams | |
| virtual | ~IDepthVisualParams () |
| Public Member Functions inherited from FakeDepthCameraDriver_ParamsParser | |
| FakeDepthCameraDriver_ParamsParser () | |
| ~FakeDepthCameraDriver_ParamsParser () override=default | |
| bool | parseParams (const yarp::os::Searchable &config) override |
| Parse the DeviceDriver parameters. | |
| std::string | getDeviceClassName () const override |
| Get the name of the DeviceDriver class. | |
| std::string | getDeviceName () const override |
| Get the name of the device (i.e. | |
| std::string | getDocumentationOfDeviceParams () const override |
| Get the documentation of the DeviceDriver's parameters. | |
| std::vector< std::string > | getListOfParams () const override |
| Return a list of all params used by the device. | |
| bool | getParamValue (const std::string ¶mName, std::string ¶mValue) const override |
| Return the value (represented as a string) of the requested parameter. | |
| std::string | getConfiguration () const override |
| Return the configuration of the device. | |
| Public Member Functions inherited from yarp::dev::IDeviceDriverParams | |
| virtual | ~IDeviceDriverParams () |
| Public Member Functions inherited from yarp::dev::IFrameGrabberControls | |
| virtual | ~IFrameGrabberControls () |
| Destructor. | |
| std::string | busType2String (BusType type) |
| FeatureMode | toFeatureMode (bool _auto) |
Additional Inherited Members | |
| Public Types inherited from yarp::dev::IRGBDSensor | |
| enum | RGBDSensor_status { RGBD_SENSOR_NOT_READY = 0 , RGBD_SENSOR_OK_STANDBY = 1 , RGBD_SENSOR_OK_IN_USE = 2 , RGB_SENSOR_ERROR = 3 , DEPTH_SENSOR_ERROR = 4 , RGBD_SENSOR_GENERIC_ERROR = 5 , RGBD_SENSOR_TIMEOUT = 6 } |
| Public Attributes inherited from FakeDepthCameraDriver_ParamsParser | |
| const std::string | m_device_classname = {"FakeDepthCameraDriver"} |
| const std::string | m_device_name = {"fakeDepthCamera"} |
| bool | m_parser_is_strict = false |
| const parser_version_type | m_parser_version = {} |
| std::string | m_provided_configuration |
| const std::string | m_rgb_h_defaultValue = {"480.0"} |
| const std::string | m_rgb_w_defaultValue = {"640.0"} |
| const std::string | m_dep_h_defaultValue = {"480.0"} |
| const std::string | m_dep_w_defaultValue = {"640.0"} |
| const std::string | m_accuracy_defaultValue = {"0.001"} |
| const std::string | m_rgb_Vfov_defaultValue = {"50.0"} |
| const std::string | m_rgb_Hfov_defaultValue = {"36.0"} |
| const std::string | m_dep_Vfov_defaultValue = {"50.0"} |
| const std::string | m_dep_Hfov_defaultValue = {"36.0"} |
| const std::string | m_dep_near_defaultValue = {"0.2"} |
| const std::string | m_dep_far_defaultValue = {"6.0"} |
| double | m_rgb_h = {480.0} |
| double | m_rgb_w = {640.0} |
| double | m_dep_h = {480.0} |
| double | m_dep_w = {640.0} |
| double | m_accuracy = {0.001} |
| double | m_rgb_Vfov = {50.0} |
| double | m_rgb_Hfov = {36.0} |
| double | m_dep_Vfov = {50.0} |
| double | m_dep_Hfov = {36.0} |
| double | m_dep_near = {0.2} |
| double | m_dep_far = {6.0} |
| Protected Types inherited from FakeDepthCameraDriver_mini | |
| typedef yarp::sig::ImageOf< yarp::sig::PixelFloat > | depthImage |
| typedef yarp::os::Stamp | Stamp |
| typedef yarp::os::Property | Property |
| typedef yarp::sig::FlexImage | FlexImage |
| Protected Member Functions inherited from FakeDepthCameraDriver_mini | |
| void | regenerate_rgb_image () |
| void | regenerate_depth_image () |
| Protected Attributes inherited from FakeDepthCameraDriver_mini | |
| FlexImage | m_rgbImage |
| depthImage | m_depthImage |
| bool | m_depth_mirror = false |
| bool | m_rgb_mirror = false |
| std::recursive_mutex | m_mutex |
fakeDepthCamera: Documentation to be added
Parameters required by this device are shown in class: FakeDepthCameraDriver_ParamsParser
Definition at line 21 of file FakeDepthCameraDriver.h.
| FakeDepthCameraDriver::FakeDepthCameraDriver | ( | ) |
Definition at line 24 of file FakeDepthCameraDriver.cpp.
|
overridedefault |
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 40 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Get the current status of the feature, on or off.
| feature | the identifier of the feature to check |
| isActive | flag true if the feature is active, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 95 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Get a basic description of the camera hw.
This is mainly used to determine the HW bus type in order to choose the corresponding interface for advanced controls.
| device | returns an identifier for the bus |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 46 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Get the current value for the requested feature.
| feature | the identifier of the feature to read |
| value | pointer to current value of the feature, from 0 to 1 expressed as a percentage |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 65 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Get the current value for the requested feature.
| feature | the identifier of the feature to read |
| value1 | returns the current value of the feature, from 0 to 1 expressed as a percentage |
| value2 | returns the current value of the feature, from 0 to 1 expressed as a percentage |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 77 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Get the current mode for the feature.
| feature | the identifier of the feature to change |
| hasAuto | flag true if the feature is has 'auto' mode, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 125 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Check if the requested feature has the 'auto' mode.
| feature | the identifier of the feature to check |
| hasAuto | flag true if the feature is has 'auto' mode, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 101 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Check if camera has the requested feature (saturation, brightness ... )
| feature | the identifier of the feature to check |
| hasFeature | flag value: true if the feature is present, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 53 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Check if the requested feature has the 'manual' mode.
| feature | the identifier of the feature to check |
| hasAuto | flag true if the feature is has 'manual' mode, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 107 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Check if the requested feature has the 'onePush' mode.
| feature | the identifier of the feature to check |
| hasAuto | flag true if the feature is has 'onePush' mode, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 113 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Check if the camera has the ability to turn on/off the requested feature.
| feature | the identifier of the feature to change |
| hasOnOff | flag true if this feature can be turned on/off, false otherwise. |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 83 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 30 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Set the requested feature on or off.
| feature | the identifier of the feature to change |
| onoff | true to activate, off to deactivate the feature |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 89 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Set the requested feature to a value (saturation, brightness ... )
| feature | the identifier of the feature to change |
| value | new value of the feature, range from 0 to 1 expressed as a percentage |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 59 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Set the requested feature to a value using 2 params (like white balance)
| feature | the identifier of the feature to change |
| value1 | first param, from 0 to 1 expressed as a percentage |
| value2 | second param, from 0 to 1 expressed as a percentage |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 71 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Set the requested mode for the feature.
| feature | the identifier of the feature to change |
| auto_onoff | true to activate 'auto' mode, false to activate 'manual' mode |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 119 of file FakeDepthCameraDriver.cpp.
|
overridevirtual |
Set the requested feature to a value (saturation, brightness ... )
| feature | the identifier of the feature to change |
| value | new value of the feature, from 0 to 1 as a percentage of param range |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 131 of file FakeDepthCameraDriver.cpp.