|
| | commonImageProcessor (std::string data_topic_name, std::string camera_info_topic_name) |
| |
| virtual | ~commonImageProcessor () |
| |
| virtual void | onRead (yarp::rosmsg::sensor_msgs::Image &v) override |
| |
| size_t | getWidth () const |
| |
| size_t | getHeight () const |
| |
| bool | getFOV (double &horizontalFov, double &verticalFov) const |
| |
| bool | getIntrinsicParam (yarp::os::Property &intrinsic) const |
| |
| bool | getLastRGBData (yarp::sig::FlexImage &data, yarp::os::Stamp &stmp) |
| |
| bool | getLastDepthData (yarp::sig::ImageOf< yarp::sig::PixelFloat > &data, yarp::os::Stamp &stmp) |
| |
| | Subscriber (const std::string &name="") |
| | Constructor.
|
| |
| virtual | ~Subscriber () |
| | Destructor.
|
| |
| bool | topic (const std::string &name) |
| | Set topic to subscribe to.
|
| |
| bool | open (const std::string &name) override |
| | Start port operation, with a specific name, with automatically-chosen network parameters.
|
| |
| bool | open (const Contact &contact, bool registerName=true) override |
| | Start port operation with user-chosen network parameters.
|
| |
| void | close () override |
| | Stop port activity.
|
| |
| void | interrupt () override |
| | Interrupt any current reads or writes attached to the port.
|
| |
| void | resume () override |
| | Put the port back in an operative state after interrupt() has been called.
|
| |
| void | setReader (PortReader &reader) override |
| | Set an external reader for port data.
|
| |
| yarp::rosmsg::sensor_msgs::Image * | read (bool shouldWait=true) |
| | Read a message from the port.
|
| |
| bool | read (PortReader &reader, bool willReply=false) override |
| | Read an object from the port.
|
| |
| Port & | asPort () override |
| | Get the concrete Port being used for communication.
|
| |
| const Port & | asPort () const override |
| | Get the concrete Port being used for communication, const version.
|
| |
| void | onRead (yarp::rosmsg::sensor_msgs::Image &datum) override |
| | Callback method.
|
| |
| void | useCallback (TypedReaderCallback< yarp::rosmsg::sensor_msgs::Image > &callback) |
| |
| void | useCallback () |
| |
| void | disableCallback () |
| |
| void | setStrict (bool strict=true) |
| |
| bool | addOutput (const std::string &name) override |
| | Add an output connection to the specified port.
|
| |
| bool | addOutput (const std::string &name, const std::string &carrier) override |
| | Add an output connection to the specified port, using a specified carrier.
|
| |
| bool | addOutput (const Contact &contact) override |
| | Add an output connection to the specified port, using specified network parameters.
|
| |
| Contact | where () const override |
| | Returns information about how this port can be reached.
|
| |
| std::string | getName () const override |
| | Get name of port.
|
| |
| bool | setEnvelope (PortWriter &envelope) override |
| | Set an envelope (e.g., a timestamp) to the next message which will be sent.
|
| |
| bool | getEnvelope (PortReader &envelope) override |
| | Get the envelope information (e.g., a timestamp) from the last message received on the port.
|
| |
| int | getInputCount () override |
| | Determine how many connections are arriving into this port.
|
| |
| int | getOutputCount () override |
| | Determine how many output connections this port has.
|
| |
| void | getReport (PortReport &reporter) override |
| | Get information on the state of the port - connections etc.
|
| |
| void | setReporter (PortReport &reporter) override |
| | Set a callback to be called upon any future connections and disconnections to/from the port.
|
| |
| void | resetReporter () override |
| | Remove the callback which is called upon any future connections and disconnections to/from the port.
|
| |
| bool | isWriting () override |
| | Report whether the port is currently writing data.
|
| |
| void | setAdminReader (PortReader &reader) override |
| | Set an external reader for unrecognized administrative port messages.
|
| |
| void | setInputMode (bool expectInput) override |
| | Configure the port to allow or forbid inputs.
|
| |
| void | setOutputMode (bool expectOutput) override |
| | Configure the port to allow or forbid outputs.
|
| |
| void | setRpcMode (bool expectRpc) override |
| | Configure the port to be RPC only.
|
| |
| Type | getType () override |
| | Get the type of data the port has committed to send/receive.
|
| |
| void | promiseType (const Type &typ) override |
| | Commit the port to a particular type of data.
|
| |
| Property * | acquireProperties (bool readOnly) override |
| | Access unstructured port properties.
|
| |
| void | releaseProperties (Property *prop) override |
| | End access unstructured port properties.
|
| |
| bool | write (const PortWriter &writer, const PortWriter *callback=nullptr) const override |
| | Write an object to the port.
|
| |
| bool | write (const PortWriter &writer, PortReader &reader, const PortWriter *callback=nullptr) const override |
| | Write an object to the port, then expect one back.
|
| |
| bool | reply (PortWriter &writer) override |
| | Send an object as a reply to an object read from the port.
|
| |
| bool | replyAndDrop (PortWriter &writer) override |
| | Same as reply(), but closes connection after reply.
|
| |
| void | includeNodeInName (bool flag) override |
| | Choose whether to prepend a node name (if one is available) to the port's name.
|
| |
| bool | setCallbackLock (std::mutex *mutex=nullptr) override |
| | Add a lock to use when invoking callbacks.
|
| |
| bool | removeCallbackLock () override |
| | Remove a lock on callbacks added with setCallbackLock()
|
| |
| bool | lockCallback () override |
| | Lock callbacks until unlockCallback() is called.
|
| |
| bool | tryLockCallback () override |
| | Try to lock callbacks until unlockCallback() is called.
|
| |
| void | unlockCallback () override |
| | Unlock callbacks.
|
| |
| virtual | ~Contactable () |
| | Destructor.
|
| |
| void | setReadOnly () |
| | Shorthand for setInputMode(true), setOutputMode(false), setRpcMode(false)
|
| |
| void | setWriteOnly () |
| | Shorthand for setInputMode(false), setOutputMode(true), setRpcMode(false)
|
| |
| void | setRpcServer () |
| | Shorthand for setInputMode(true), setOutputMode(false), setRpcMode(true)
|
| |
| void | setRpcClient () |
| | Shorthand for setInputMode(false), setOutputMode(true), setRpcMode(true)
|
| |
| virtual | ~TypedReaderCallback () |
| | Destructor.
|
| |
| virtual void | onRead (T &datum) |
| | Callback method.
|
| |
| virtual void | onRead (T &datum, const yarp::os::TypedReader< T > &reader) |
| | Callback method.
|
| |
Definition at line 30 of file RGBDRosConversionUtils.h.


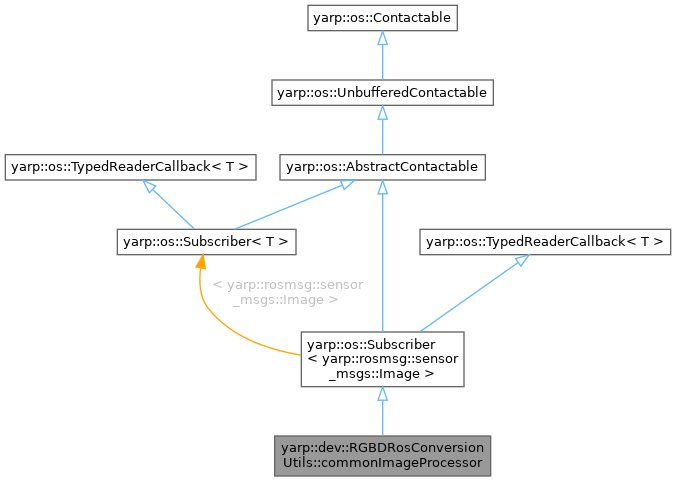
 Inheritance diagram for yarp::dev::RGBDRosConversionUtils::commonImageProcessor:
Inheritance diagram for yarp::dev::RGBDRosConversionUtils::commonImageProcessor: