|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
#include <networkWrappers/controlBoard_nws_yarp/ControlBoardServerImpl.h>
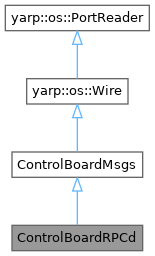
 Inheritance diagram for ControlBoardRPCd:
Inheritance diagram for ControlBoardRPCd:Definition at line 14 of file ControlBoardServerImpl.h.
|
inline |
Definition at line 22 of file ControlBoardServerImpl.h.
|
overridevirtual |
Reimplemented from ControlBoardMsgs.
Definition at line 75 of file ControlBoardServerImpl.cpp.
|
overridevirtual |
Reimplemented from ControlBoardMsgs.
Definition at line 142 of file ControlBoardServerImpl.cpp.
|
overridevirtual |
Reimplemented from ControlBoardMsgs.
Definition at line 110 of file ControlBoardServerImpl.cpp.
|
overridevirtual |
Reimplemented from ControlBoardMsgs.
Definition at line 126 of file ControlBoardServerImpl.cpp.
|
overridevirtual |
Reimplemented from ControlBoardMsgs.
Definition at line 94 of file ControlBoardServerImpl.cpp.
|
inline |
Definition at line 41 of file ControlBoardServerImpl.h.
|
overridevirtual |
Reimplemented from ControlBoardMsgs.
Definition at line 22 of file ControlBoardServerImpl.cpp.
|
overridevirtual |
Reimplemented from ControlBoardMsgs.
Definition at line 58 of file ControlBoardServerImpl.cpp.
|
overridevirtual |
Reimplemented from ControlBoardMsgs.
Definition at line 41 of file ControlBoardServerImpl.cpp.