Loading...
Searching...
No Matches
#include <QApplication>
#include <QWidget>
#include <QPushButton>
#include <QHBoxLayout>
#include <QLabel>
#include <QThread>
#include <QVBoxLayout>
#include <yarp/os/Os.h>
#include <yarp/os/Log.h>
#include <yarp/os/LogStream.h>
#include <yarp/os/Network.h>
#include <yarp/os/RFModule.h>
#include <yarp/os/Property.h>
#include <yarp/os/Thread.h>
#include <yarp/dev/PolyDriver.h>
#include <yarp/dev/AudioGrabberInterfaces.h>
#include <iostream>
#include "main.moc"
Go to the source code of this file.
|
| int | main (int argc, char *argv[]) |
| |
◆ ERROR_RETURN_CODE
| #define ERROR_RETURN_CODE 0 |
◆ main()
| int main |
( |
int |
argc, |
|
|
char * |
argv[] |
|
) |
| |
- Examples
- carrier/carrier_stub.cpp, dev/fake_motor/fake_motor.cpp, dev/grabber_client/grabber_client.cpp, dev/grabber_crop/grabber_crop.cpp, dev/motortest/motortest.cpp, external/nameclient.c, framerate/main.cpp, imagemagick/main.cpp, opencv/main.cpp, os/bottle_add/bottle_add.cpp, os/browse_bottle/browse_bottle.cpp, os/buffered_port/buffered_port.cpp, os/database/database.cpp, os/make_count/make_count.cpp, os/periodicthread/periodicthread.cpp, os/portable_pair/portable_pair.cpp, os/simple_receiver/simple_receiver.cpp, os/simple_sender/simple_sender.cpp, os/summer/summer.cpp, os/threads/threads.cpp, os/view_count/view_count.cpp, port_power/ex0000_receiver.cpp, port_power/ex0001_sender.cpp, port_power/ex0002_connector.cpp, port_power/ex0100_receiver.cpp, port_power/ex0101_sender.cpp, port_power/ex0200_polling.cpp, port_power/ex0300_port_callback.cpp, port_power/ex0301_buffered_callback.cpp, port_power/ex0302_buffered_ext_callback.cpp, port_power/ex0400_expect_reply.cpp, port_power/ex0401_give_reply.cpp, port_power/ex0402_port_callback_reply.cpp, port_power/ex0403_bufferedport_callback_reply.cpp, port_power/ex0500_raw_target_receiver.cpp, port_power/ex0501_raw_target_sender.cpp, port_power/ex0502_raw_target_connector.cpp, port_power/ex0503_serial_target_receiver.cpp, port_power/ex0504_serial_target_sender.cpp, port_power/ex0505_compliant_target_receiver.cpp, port_power/ex0506_compliant_target_sender.cpp, port_power/ex0507_alternative_compliant_target_receiver.cpp, port_power/ex0508_alternative_compliant_target_sender.cpp, and property/main.cpp.
Definition at line 121 of file main.cpp.


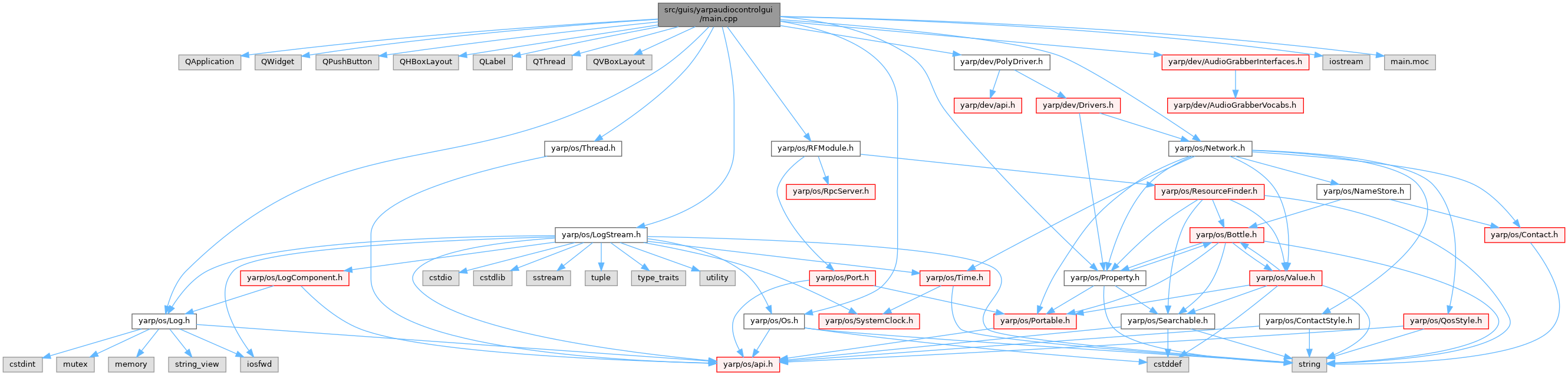
 Include dependency graph for main.cpp:
Include dependency graph for main.cpp: